 Ramón Calvo
Ramón CalvoAlthough we haven't updated the project for a while (almost three months!), we had not stopped working on this project, but it is true that we slowed down because we had to do our final and university entrance exams. So I will make a quick update of what has been happening those months.
We soldered the components and tested that everything worked fine, but when I started programming, I noticed that the motors and servos weren't connected to the pins I expected (timer0 of the AVR [OCRA and OCRB] to the dc motors and timer1 to both servos). The servos were connected to timer0 and the left and right dc motors were connected to a different timer. That was my mistake. Before sending the PCBs to Elecrow I didn't check that I sent Antonio the wrong schematic.
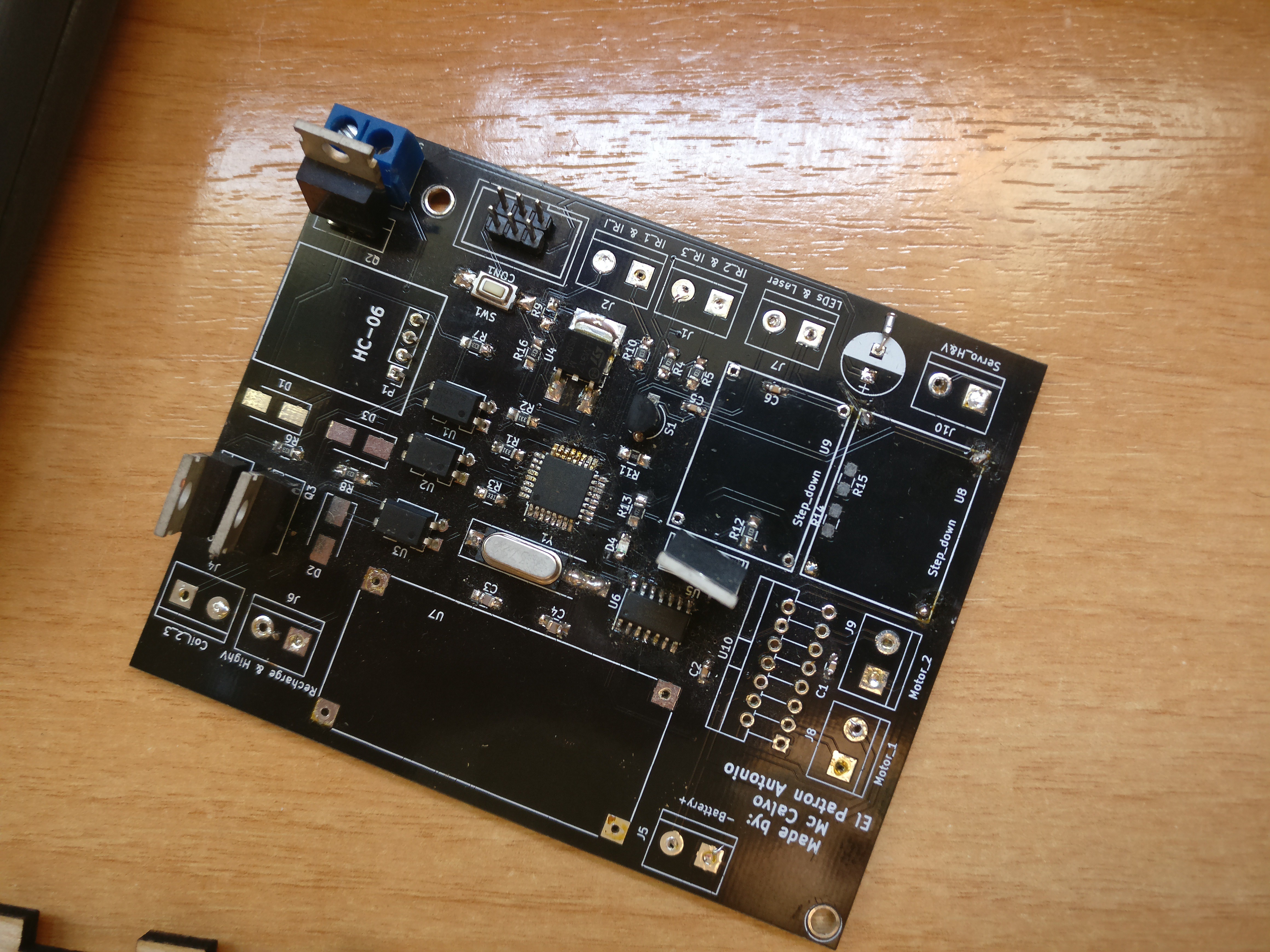
So we changed the PCB design and we had them made by Elecrow, again. This time they were offering the same service for half the price, so we got the PCBs made and shipped to Spain for less than 10€. We soldered everything, re-using the electronics of the previous boards. The bluetooth breakout board lost a pad during the process so I did a work-around soldering the Rx pin directly with a white wire.
Once everything was ready, I wrote the new code for the well-connected motors and the servos. Finally, everything worked just fine. Here is a video of the whole thing:
I have to say that the left joystick works fine (although it needs some adjustments) but I swiped it gently so the tank wouldn't fall off the table.
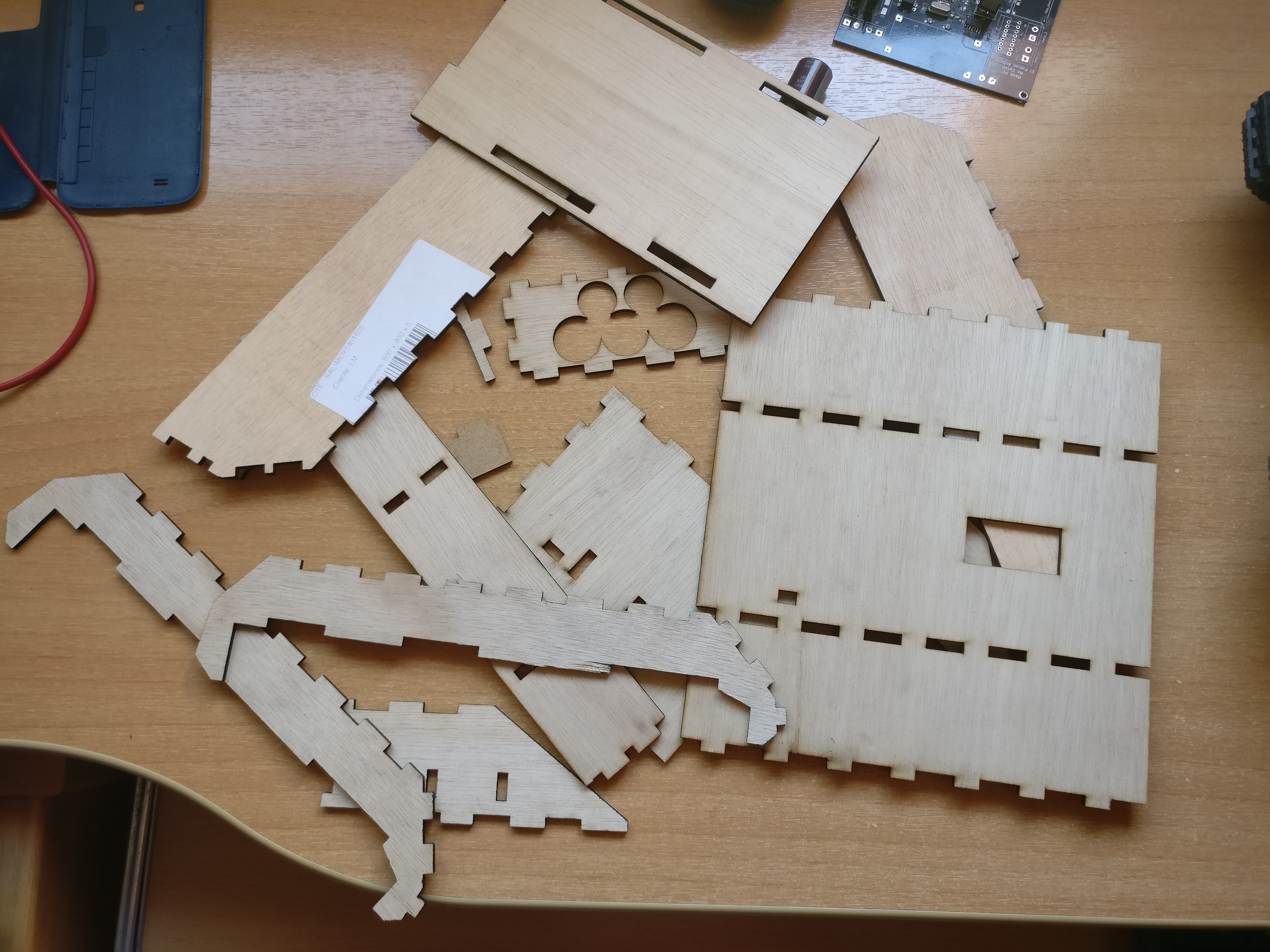
Also, I have used the laser cutter to cut the tank model. But the wooden boards weren't of the width we needed (3mm instead of 4mm), so I use what I have only for prototyping.
Here is a picture of all the pieces:
We still have to make the coil canon, let's see how lucky we are...
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.