 Paul Crouch
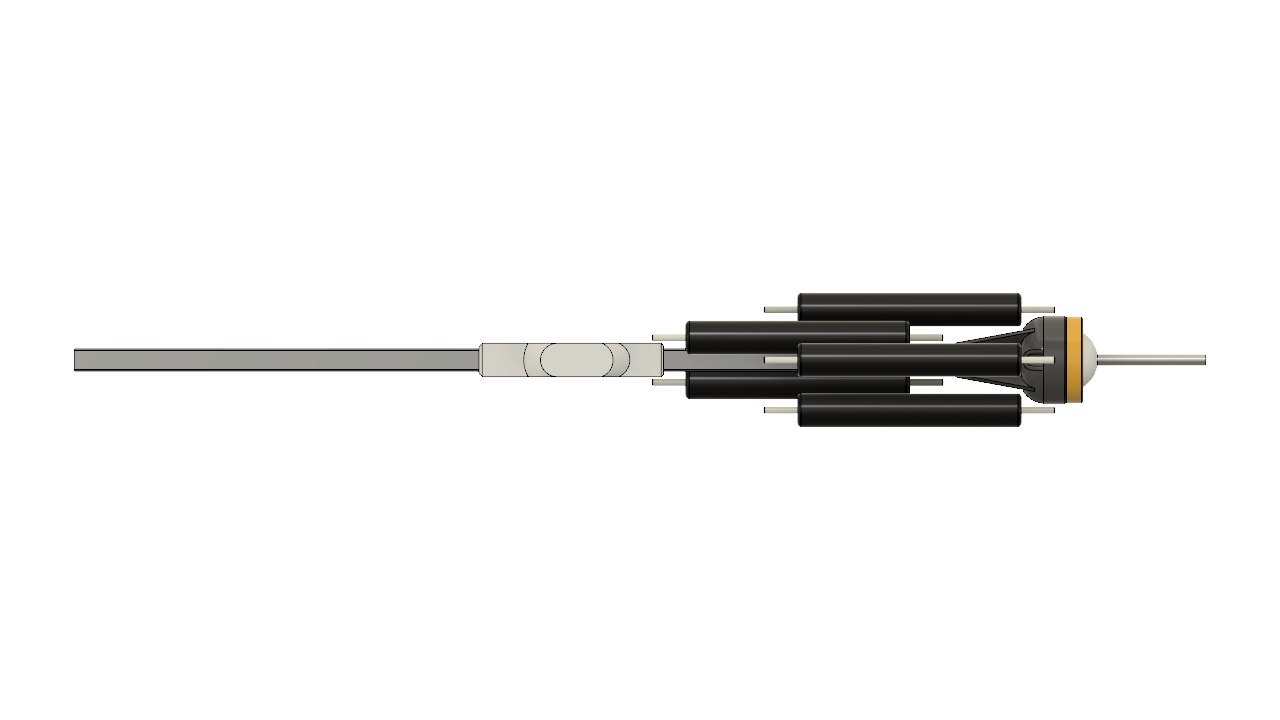
Paul CrouchIn order to help me decide on whether to proceed with PAMs or switch to motors, I made a crude model of a leg. It's difficult to see here but there's 4 PAMs for the hip (up/down & left/right) and 2 PAMs for the knee. The paracord "tendons" that attach to the muscles are not shown. The knee joint has a small drum built-in for the paracord to wrap around, to give (in theory) 180° of travel based on ~30mm of PAM stroke.

But I'm still not convinced. I've held off printing or buying any more parts until I can decide on which method I want to go with. I only buy enough of something to build a prototype and don't consider anything as wasted as I usually I learn something from it.
In parallel to the PAM/motor dilemma, I began to dislike the direction I was going in with the overall design finding it is too restricting and, currently lacking some lower-body structure to work on, I felt I'd been caught in a loop with it; PAM actuation would mean one type of leg mounting configuration and motors require another. The head-drive felt like a bodge too (and subsequently gave substandard performance) with little room to improvements. My early "hash" chassis was becoming a hindrance. So I had a re-think.
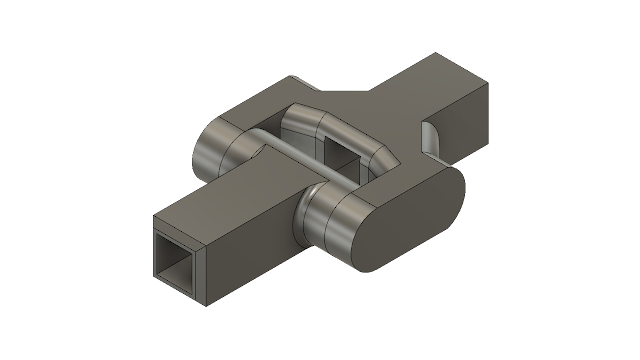
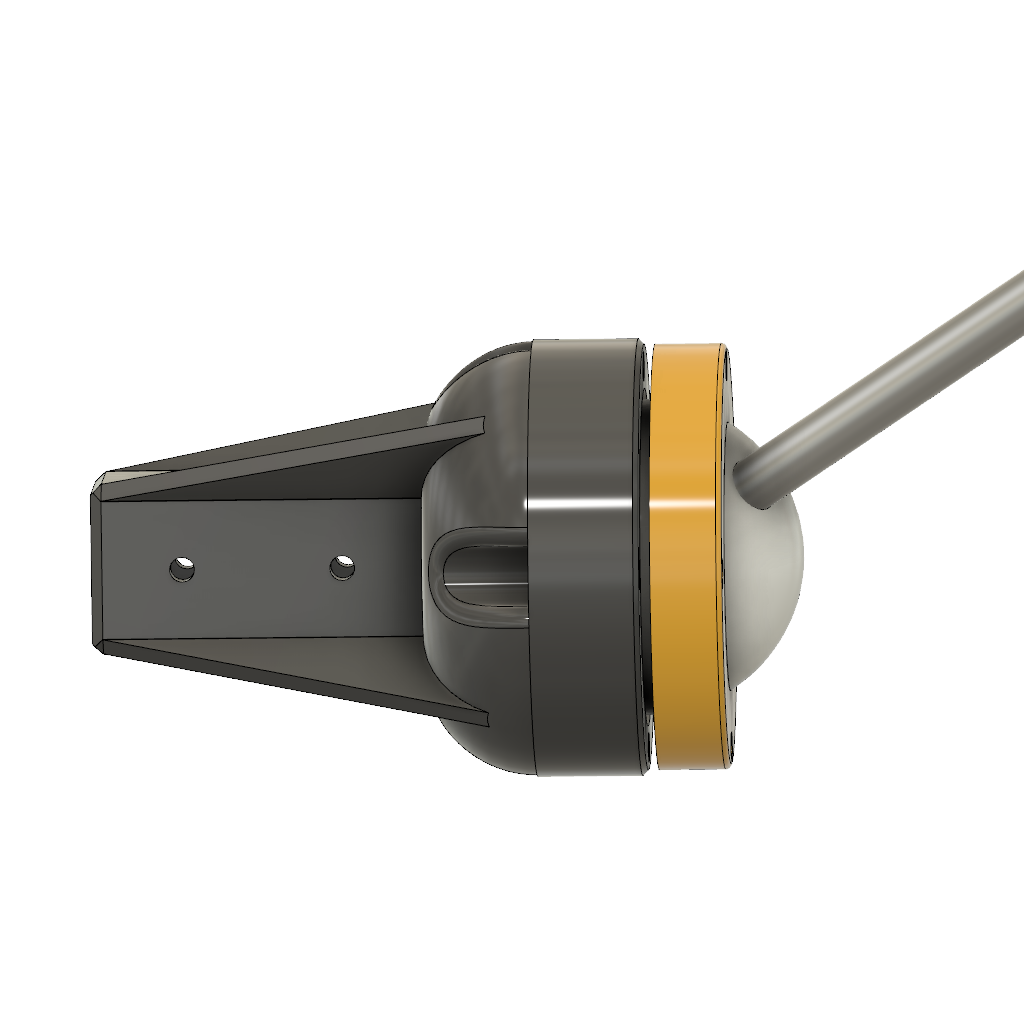
Below is crude model, just to get a feel for proportions, of an alternative chassis using 2020 profile. It will allow more freedom to adjust things and, more importantly, give me some lower-body structure to work on. The head will still be able to pitch, roll, yaw and move in the Z axis via the existing pitch/roll mechanism and linear actuator (not shown), though the yaw drive will probably move to the end of the linear actuator rather than turn the whole thing as I do currently.

If using PAMs, the mounts for the hip ball-joints would be tilted back to allow the legs to fold against/into the body. They may have to be actuated too in order to achieve the desired range. PAMs aren't going to cut it if I have to add extra motors to work-around their shortcomings.
I intend to have panels and the shape of the leg themselves give a more closed cylindrical look when folded up but a completely different look when opened out. I feel that I'll have more room for additional appendages too.
Motors
The more I learn about BLDC motors the more I'm favouring them. I was unsure if I could easily get a high enough current ESC that has an equal reverse speed but it seems they are available, if I understand correctly it's the calibration/setup that determines min/max scaling for forward and reverse. I have also looked at VESC and ODrive but aside from availability issues, they are both quite an investment just to try, so I'll need to be sure.
Looking at Hobbyking outrunner BLDCs:
57g £9.23 7A 75W 3S KEDA 28-30 920KV Outrunner (purchased)
153g £16.28 28A 450W 3-4S KEDA 36-48 1030Kv Outrunner 4S
291g £24.36 37A 600W 3-4S KEDA 49-55 750Kv Outrunner 4S
290g £19.84 65A 1300W 5-6S KEDA 43-62 1650Kv Outrunner 6S
390g £29.61 50A 1300W 5-6S KEDA 49-64 330Kv Outrunner 6S
500g £29.61 80A 1500W 5-6S KEDA 56-63 195KV Outrunner 6S
670g £36.48 90A 2000W KEDA 63-64 190KV Outrunner 10S
275g £36.45 58A 1260W 5-7S Turnigy Aerodrive SK3-5045-450KV
376g £37.49 65A 1630W 6-10S Turnigy Aerodrive SK3-5055-320KV
369g £39.37 60A 1510W 6-10S Turnigy Aerodrive SK3-5055-280KV
531g £45.44 65A 2050W 6-10s Turnigy Aerodrive SK3-5065-275KV
530g £45.53 60A 1850W 10S Turnigy Aerodrive SK3-5065-236KV
In looking at a selection of motors and watching some BLDC motors in use in a number of YouTube videos, I'm trying to understand what I need. I've also played some more with a small motor that I bought months ago.
PAMs are becoming less attractive
- Short stroke, desired range of motion difficult without torque reduction/speed increase. Would still need additional actuators to properly fold legs.
- Non-linear force, max when extended (relaxed/start).
- Non-locking.
- Compliant (difficult to position).
- Volume/mass of compressor(s) (~3kg each), reservoir(s) (<1kg with plastic bottles) and valves (>400g per DOF). 400g x 12 (at least) + 3kg = 7.8kg
- Muscle construction variations.
+ Compliant (suspension).
+ Can be slowed with flow restriction. Regulator/valve cost, size, weight?
And I think I have a workable solution for the main hip actuation that is within my ability to produce, so I've pretty much decided on motors!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
i'm not sure about hobbyking to be a good place to buy bldc
also my pmm should be interesting for this project
used software for pics ?
Are you sure? yes | no
The images are captured in Fusion 360, from the models.
I've looked at your PMM project page but couldn't get an idea of what it is or how it works. Can you update the page with more info?
Do you know of a better/cheaper supplier than Hobbyking?
Are you sure? yes | no
i can use openscad with almost no mouse so to view pmm.scad you need openscad (few details in comments); rotate and it will end to rotate itself
bldc as china go-kart motors ??
updated
Are you sure? yes | no
i can also make a mechanical design (gears+bearings) that add both speed & force but it need tests to know if dangerous. do you want to test it ? what is your 3d printer build size ?
Are you sure? yes | no
malvasio.christophe, I downloaded Openscad and opened the file but honestly couldn't make much sense of what I was seeing. My printer is ~220mm square but the extremes aren't that usable.
Are you sure? yes | no