 Paul Crouch
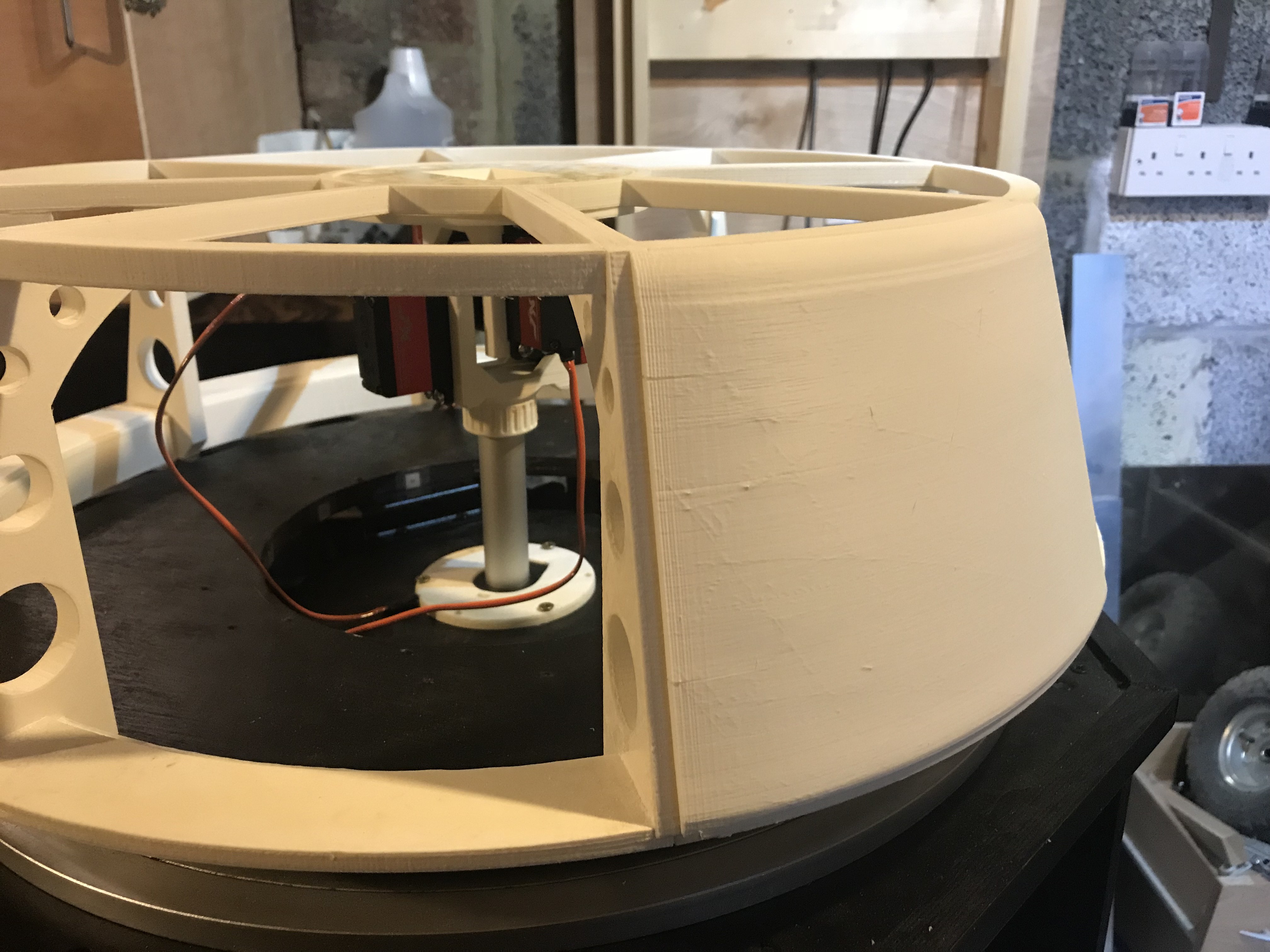
Paul CrouchThe head skeleton is pretty much done. But I'm not sure exactly which sensors I'll be using or how I'm going to mount them, so that's been delaying things a little bit.

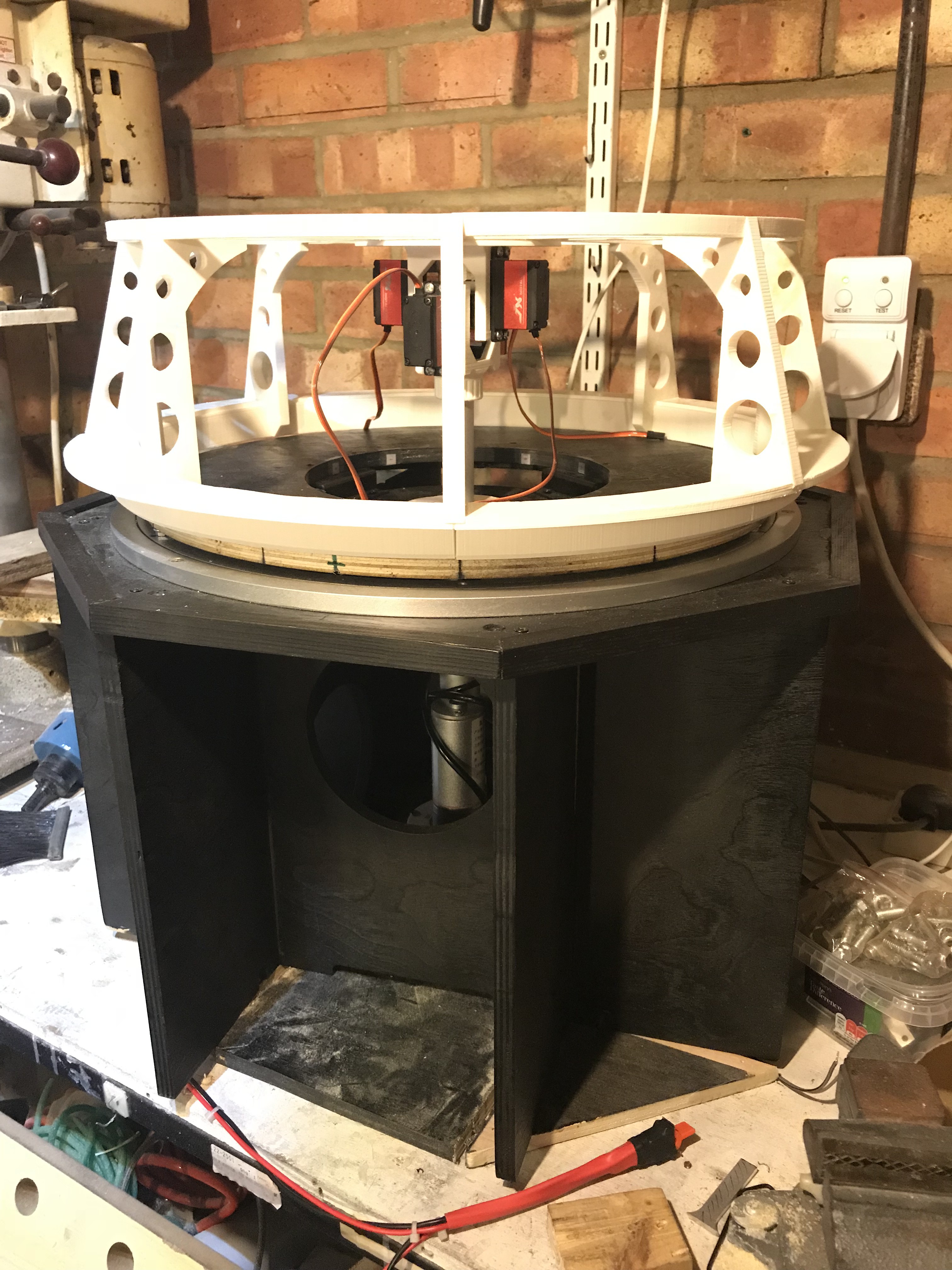
I need to adjust the final height of the linear actuator to match with the parked position of the head. It won't be fully extended is use; just enough to allow for pitch and roll. It will only be extended fully for access.
All 3DP parts are in ABS so they can be solvent-welded together. Will obviously need filling and sanding before painting. I have had a few problems with the recent cold ambient temperatures and the 3D printer, nothing that can't be managed.
I've also setup Octoprint on a old Raspberry Pi with a webcam to keep an eye on prints, very handy!
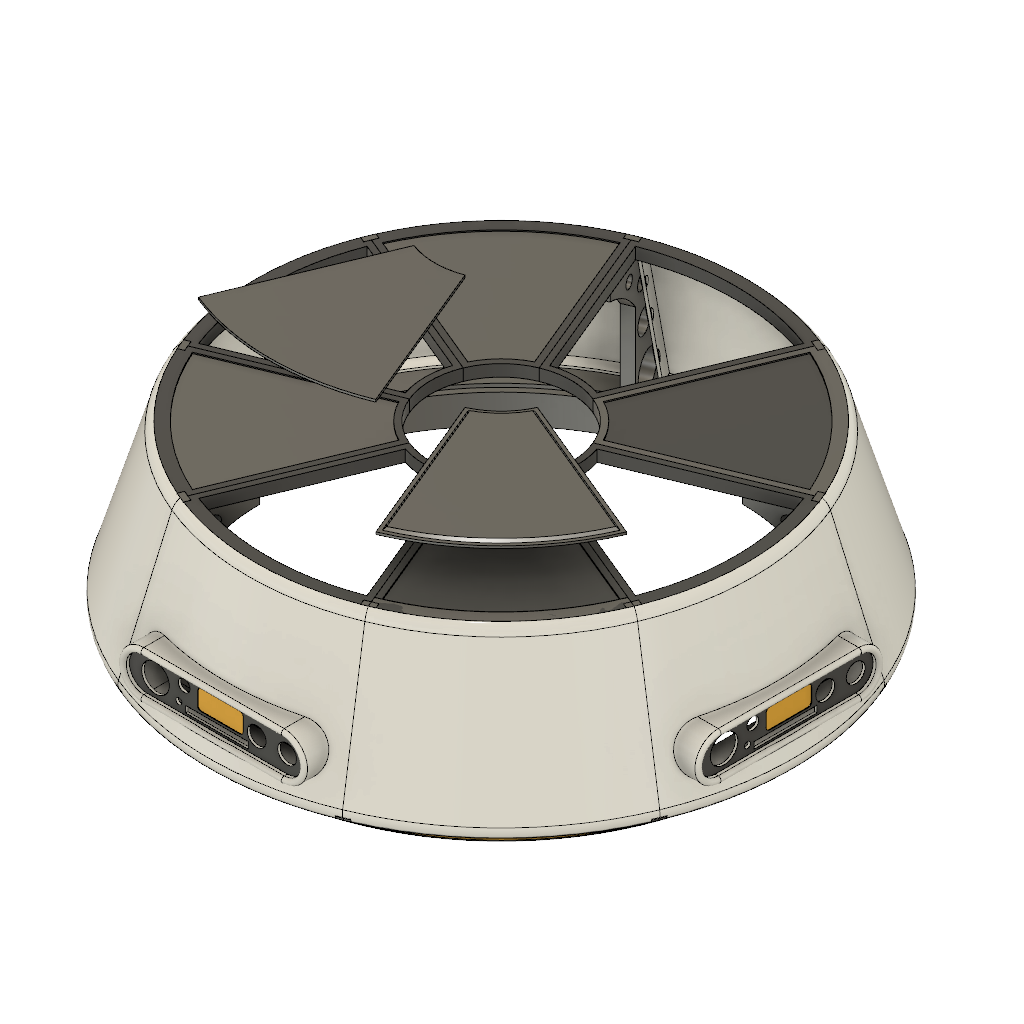
I have already decided against this scheme, but I'm still torn between 3DP panels and shaped aluminium panels or possibly a mixture of both.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.