So after a lot of research, we had to clear the question of which sensor we will use for our device. First of all, our idea was to create a device with two modes on it : an outside mode which will use the ultrason sensor and an inside mode with the Tof sensor (Time of Flight). The decision has been made because of the range of the different sensors : the ultrason one can detect to 4.5 meter and the ToF one to 2 meter.
And the first problem appeared : because the cone of detection of the ultrason sensor is too wide at the end. After asking some aquitances, we cannot differentiate what is in front of us or in the extreme corner of the cone of the ultrason.
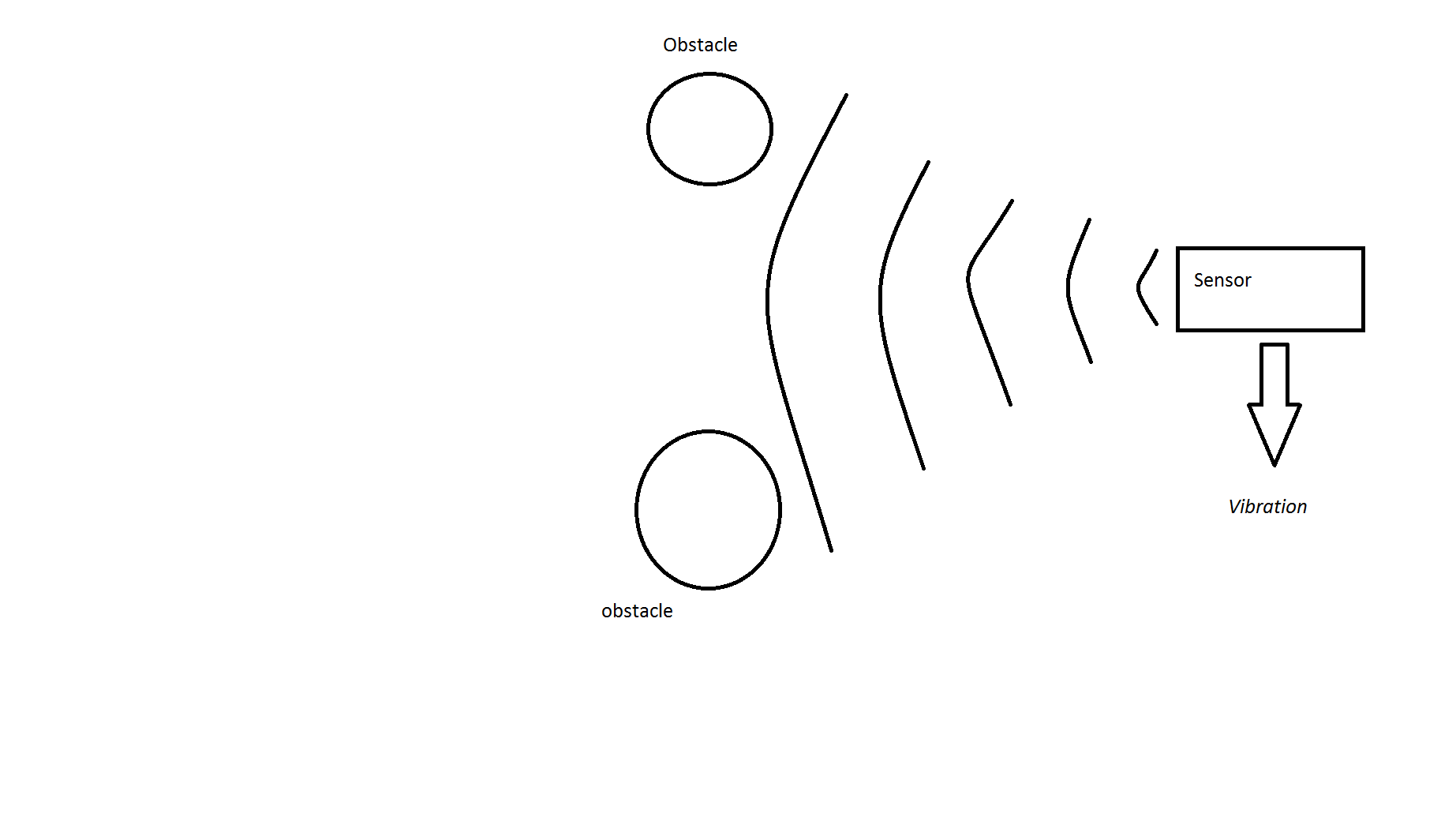
(Basic diagram of what can append and could disturb the "vision" of the holder)
So, with the help of the teachers, we thought about triangulation.
The idea is if the two sensors detect an object, it will activate the vibration motor.
By positionning the two sensors to have a straight line, we can have a pretty accurate line of detection.
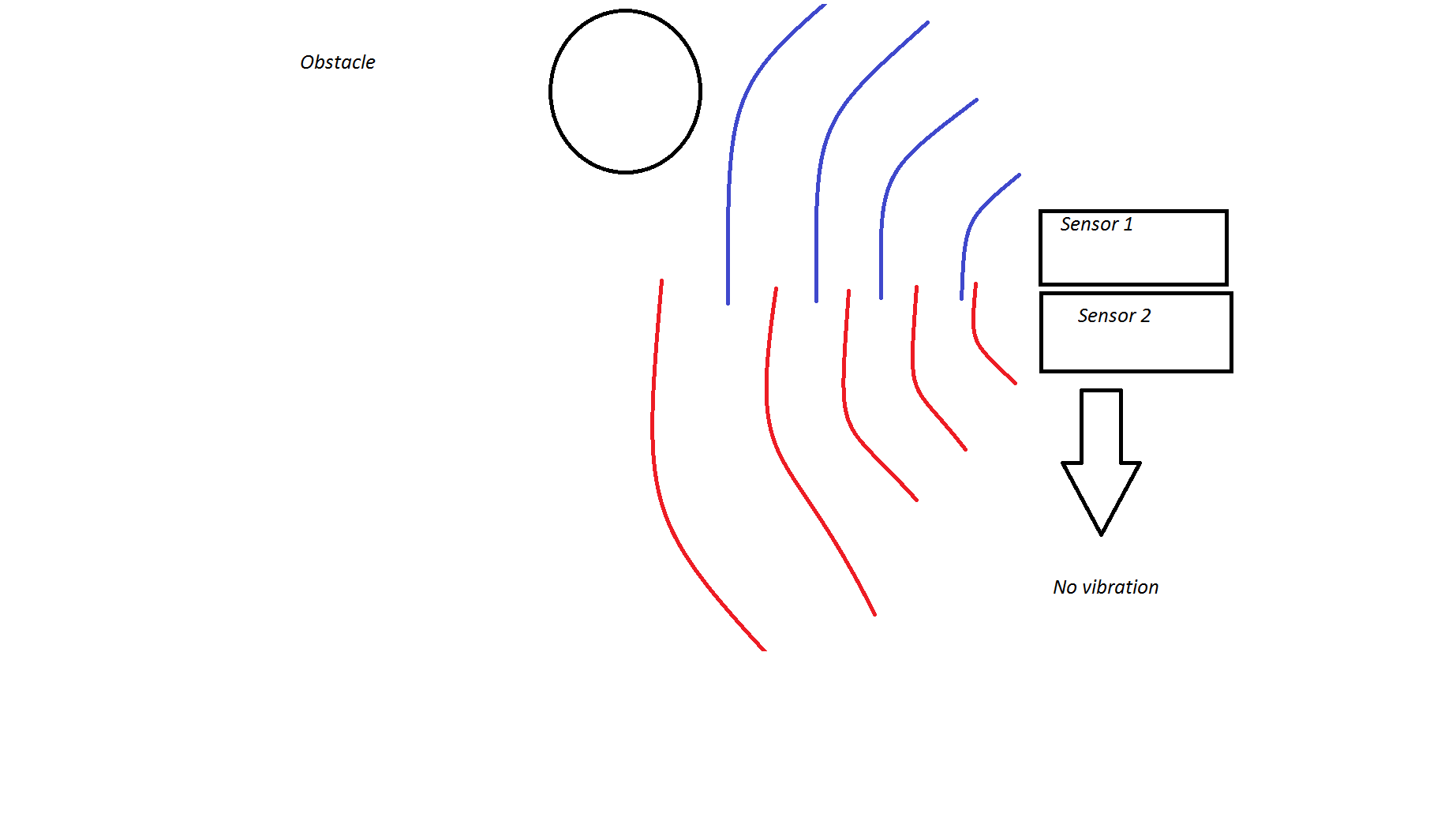
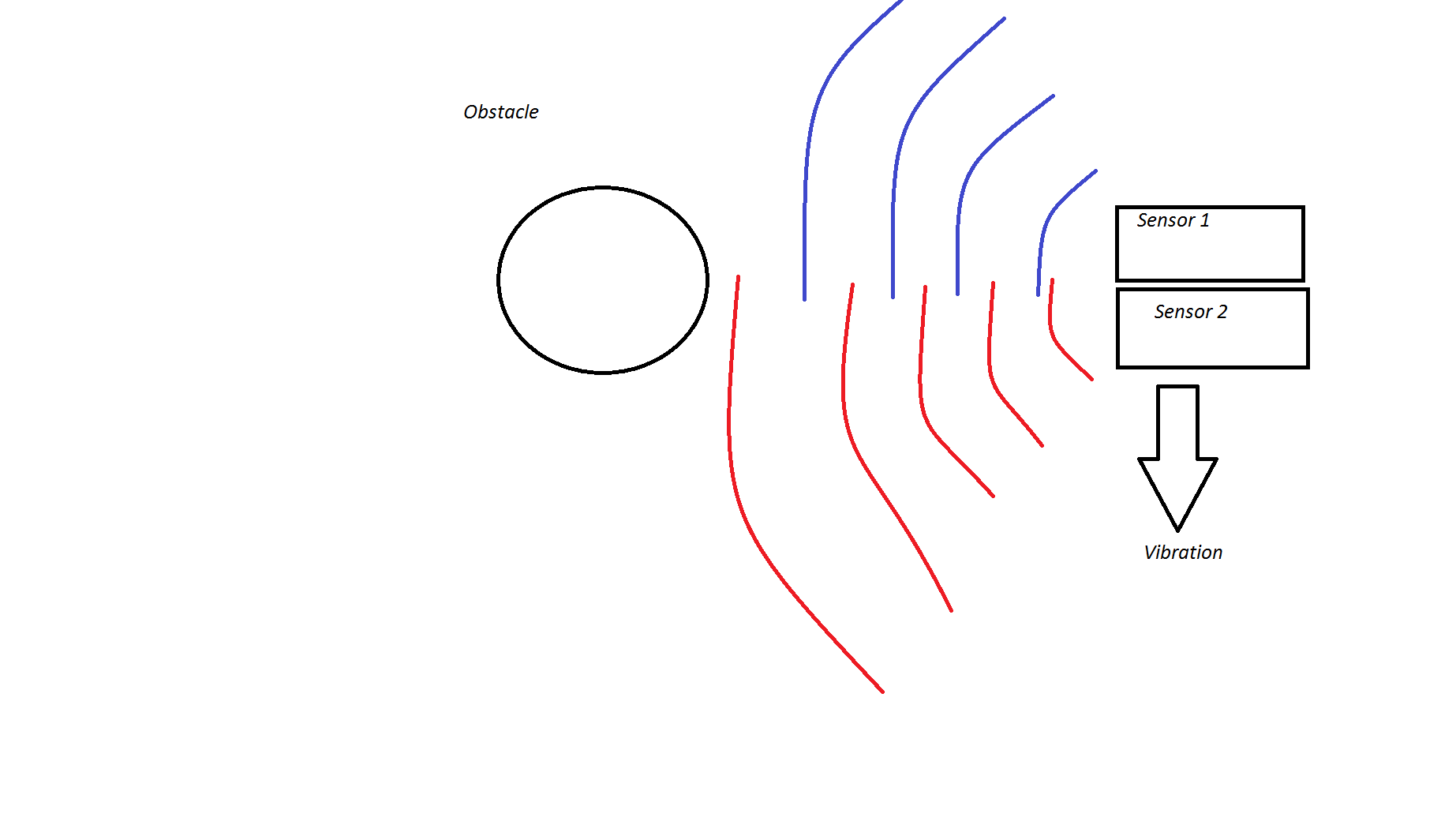
(diagrams of the triangulation)
Then, after a second thought, we realized that, because ultrason sensor cannot differentiate obstacles and there localisations, if we put two obstacles in front of the extrem corner of each cone, the device will probably still vibrate, even if the obstacles are not directly in front of the two sensors.
So another problem blocked our project.
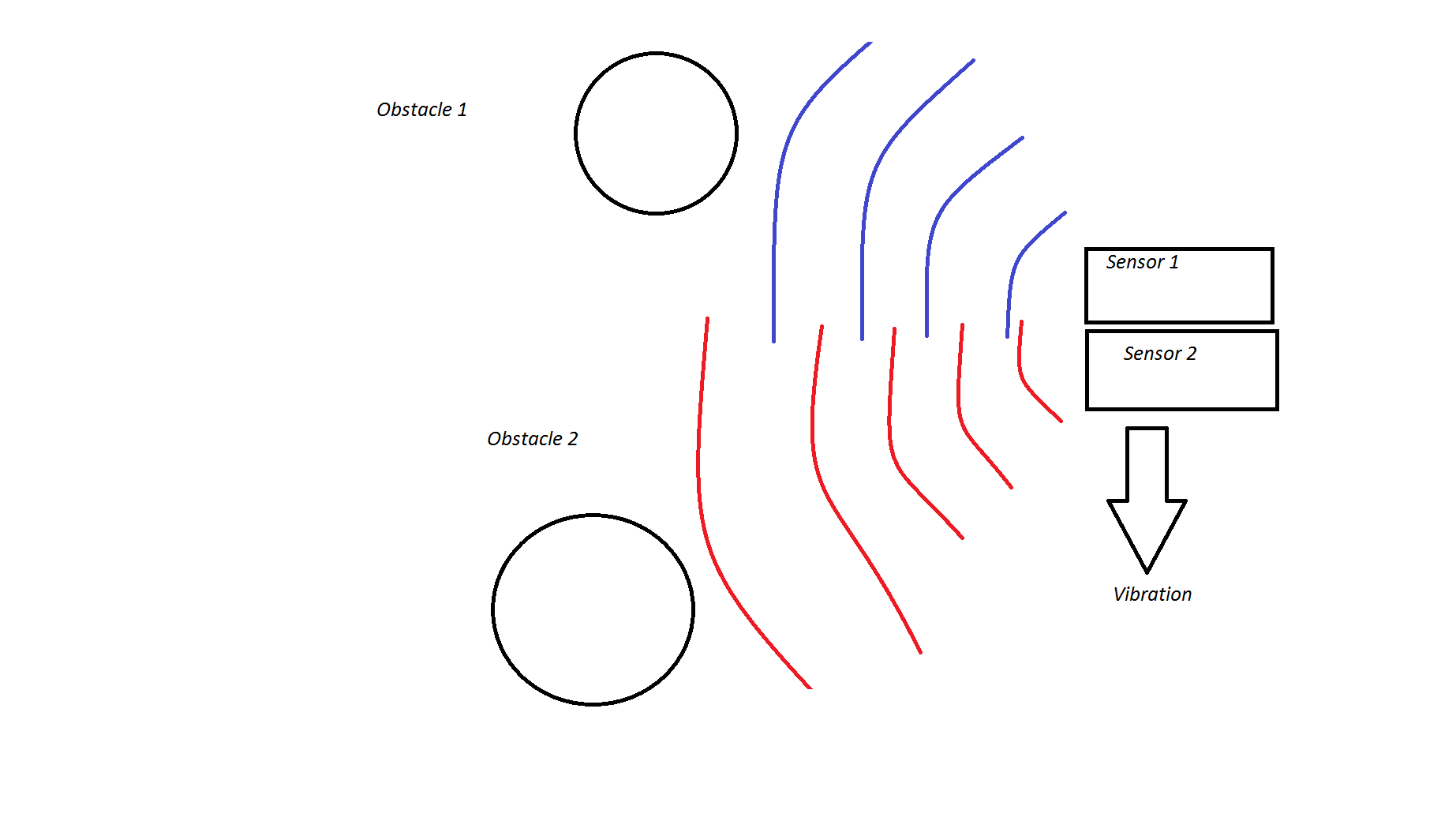
(Diagram of a potential problem which could happend. Limit of the triangulation.)
So at the end, because time is limited, we thought about give up for now the idea of two different modes on our device.
We will work only on the ToF sensor and if we have still time, and maybe come back with solutions for the ultrason sensor.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.