 Gordon
GordonThere are a few modifications I will make on the bot today.
The first is the solar panel. Where it was mounted currently, the Arduino is just beneath it, as well as a mess of wires. I had to put hot glue down fast then put some pressure on the solar panel to get it to go into place. But after placing the bot under a very bright light the hot glue softened and the panel lifted up.

I am going to print a "hat" or bracket of some sort, that can be easily removed that a larger solar panel will fit into. This will also allow easy access to the Arduino as well as plenty of space for the wiring.
The only downside to doing this is it will remove the ability of the robot being able to drive if it gets flipped over. But so far that has not happened, so I am willing to sacrifice that feature. I still want it to be as low profile as possible for driving under shelves and furniture.
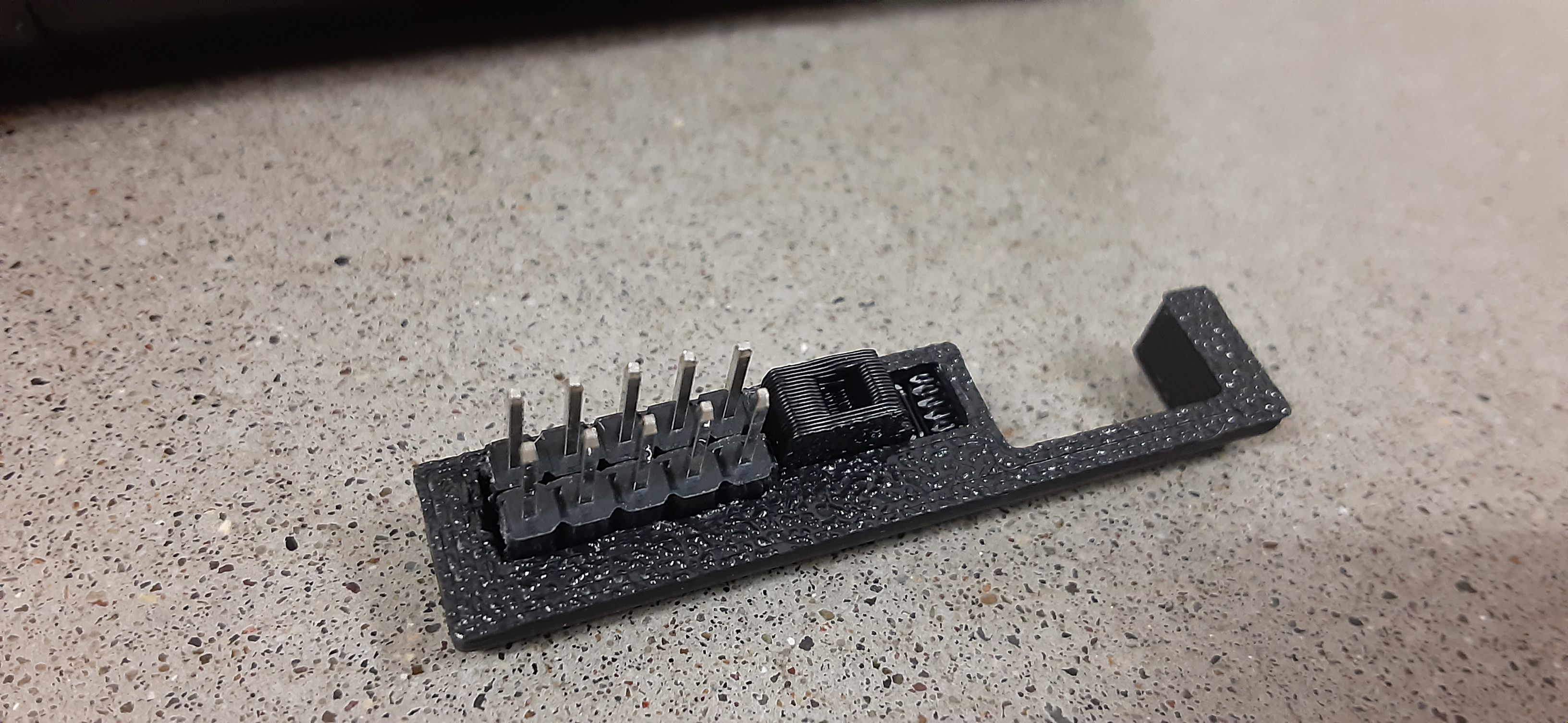
The second modification will be a small panel for the back ports and switch. As of now the switch is pretty recessed so it is hard to easily access. Also there is no internal connection for the Arduino and ESP32 Serial pins. This is done through the programming header. So The panel I will print that has a better switch on it will also have space for a male header that can be bridged to make those connections. This panel will be easy to unplug in order to program the robot.
The modifications are complete! I had to print the switch and port cover several times to get everything lined up. But now it's a bit easier to to turn it on and off, and the port cover has a header with the Tx - Rx pins from and to Arduino and ESP32 bridged, so no need to jump with wires.
With all the extra room with the added Hat for the larger solar panel, I decided to install a DHT-11 Temperature and humidity sensor. These sensors are not super accurate, but I had a bag of them in my modules box so figured I would throw one in. There is enough room in there to add a piezo buzzer so the robot can make some noise too.



Now I just need to update the code to handle the DHT-11 Sensor, as well as modify a few bugs in the Serial transfer function that I am using to pass data from Arduino to ESP32.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.