 Katie
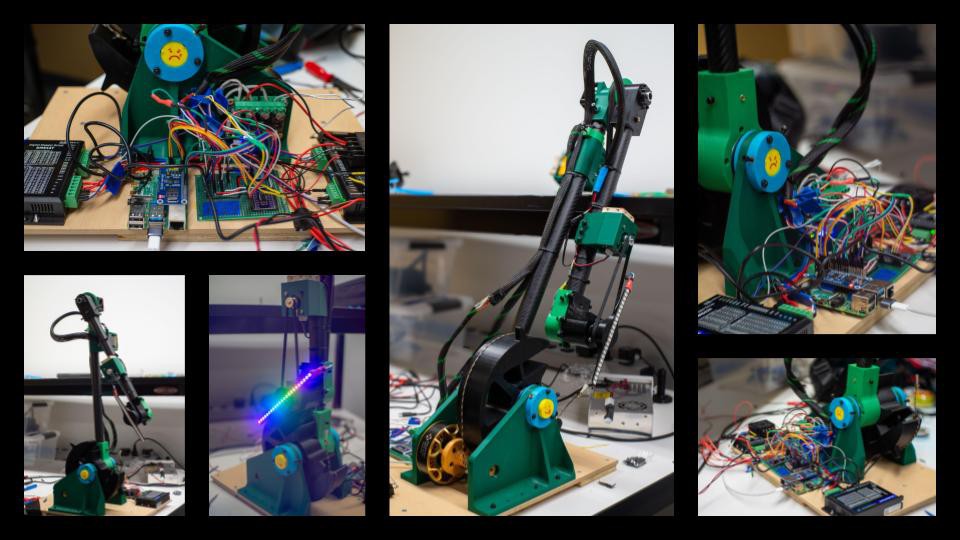
KatieHardware Updates:
- Rewired the robot
- Added all the encoders
- Increased density of LEDs in the light bar
- Added the base motor; connnected Raspberry Pi to the Odrive
- Added cooling for the steppers using heatsinks and fans
Software Updates:
- Created a simple simulation to test the kinematics of the arm as it moves to a prescribed set of points
Current Challenges:
- We're having difficulty get the arm to move smoothly
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.