 jfries
jfriesThe tale of a surprisingly complex project began soon after midnight on January 16th, 2025. The desired outcome was simple enough: construct a robot capable of traversing gutter pipes and cleaning them (ideally).
We quickly realized that such a "simple" idea was really quite demanding.
From two hours of research, deliberating on whiteboards and paper, and discussing our design ideas,
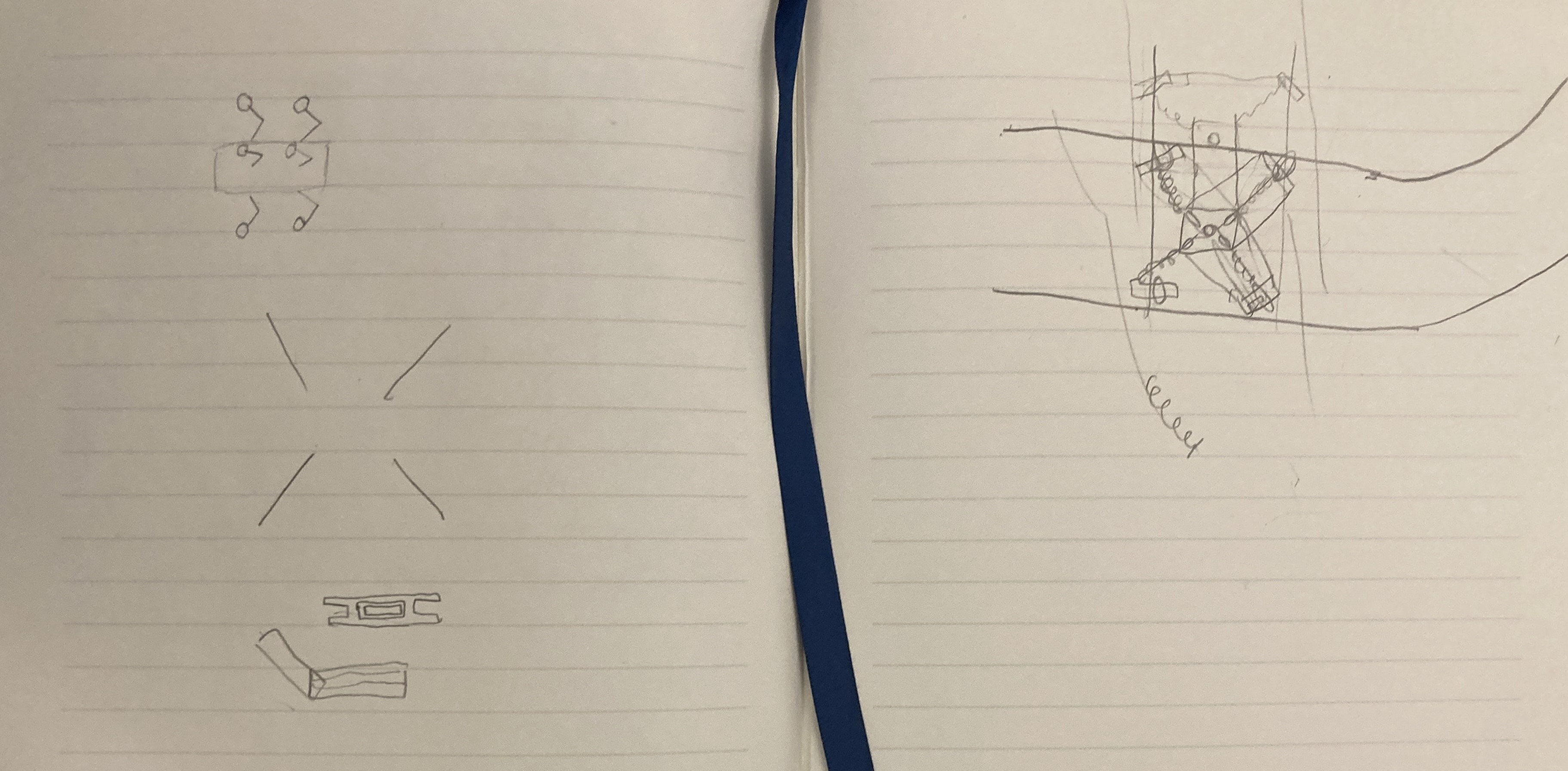

a *very* rough sketch was born:

Caster wheels perpendicular to the robot's motion would stabilize its position in the pipe while two side arms with wheels driven by motors on either end would drive it forward/backward. In order to account for differing pipe diameters, those side arms would soon become four-bar linkage systems to allow the robot to shrink or grow as needed.
All that was left to do now was CAD the thing and discus the design with our course's instructor.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.