 estanton
estantonWe started printing parts and the parts we ordered came in. There were some initial issues with hole size tolerances, expecially between the different types of printers we were using. Also, some of the hole distances didn't fit completely with the electronics we ordered, so we needed to adjust for that.

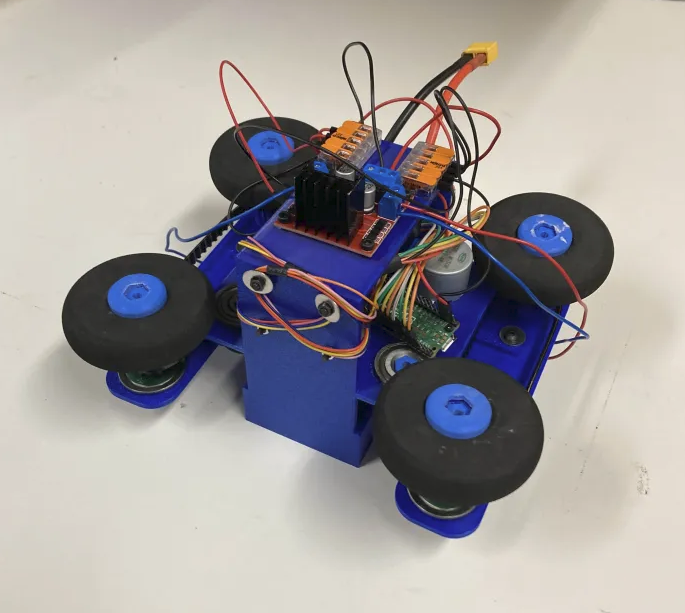
Then we did a rough assembly of the robot to make sure everything fit and finished the majority of the electronics.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.