 Peter Wallhead
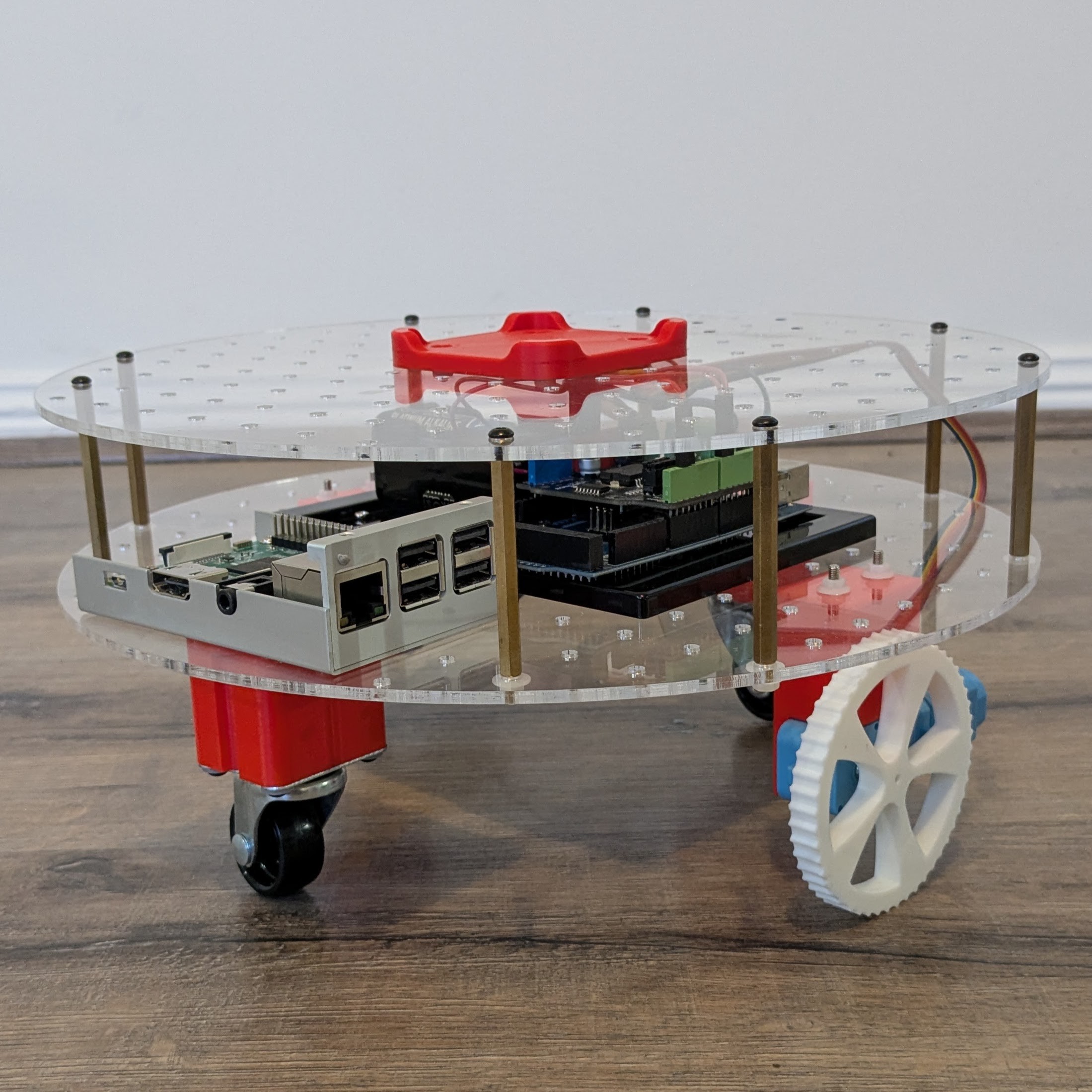
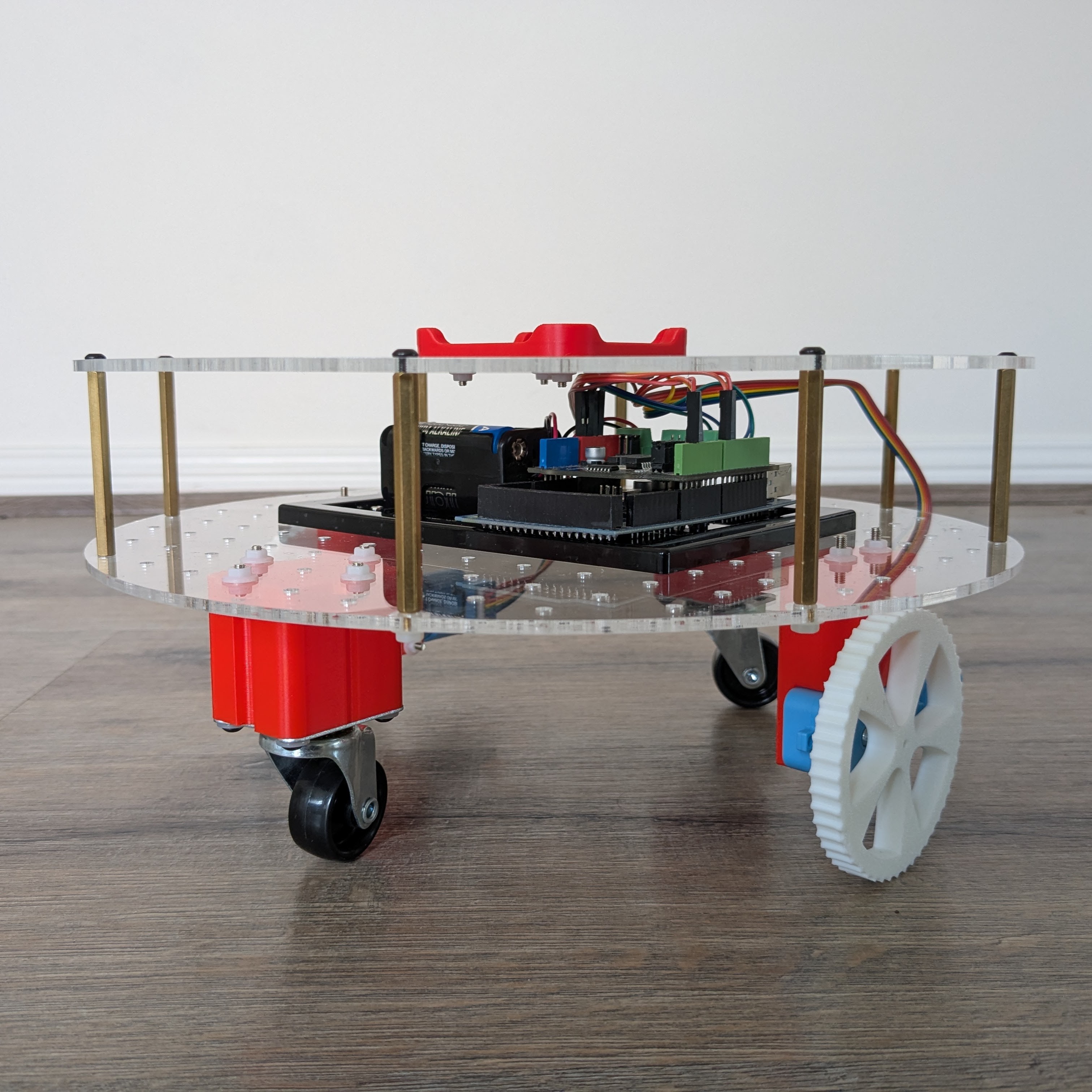
Peter WallheadTesting different component layouts with an Arduino Mega as the motor driver and a Raspberry Pi 3 Model B for a controller.
The RPLidar unit will likely sit in the centre of the upper level to provide the clearest view of the robot's surroundings.
A project log for Indoor Autonomous Mobile Platform
Building a prototype Autonomous Mobile Robot (AMR) to apply ROS 2 and SLAM concepts in a real-world environment.
Testing different component layouts with an Arduino Mega as the motor driver and a Raspberry Pi 3 Model B for a controller.
The RPLidar unit will likely sit in the centre of the upper level to provide the clearest view of the robot's surroundings.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.