 Luis, Chloe, Ola
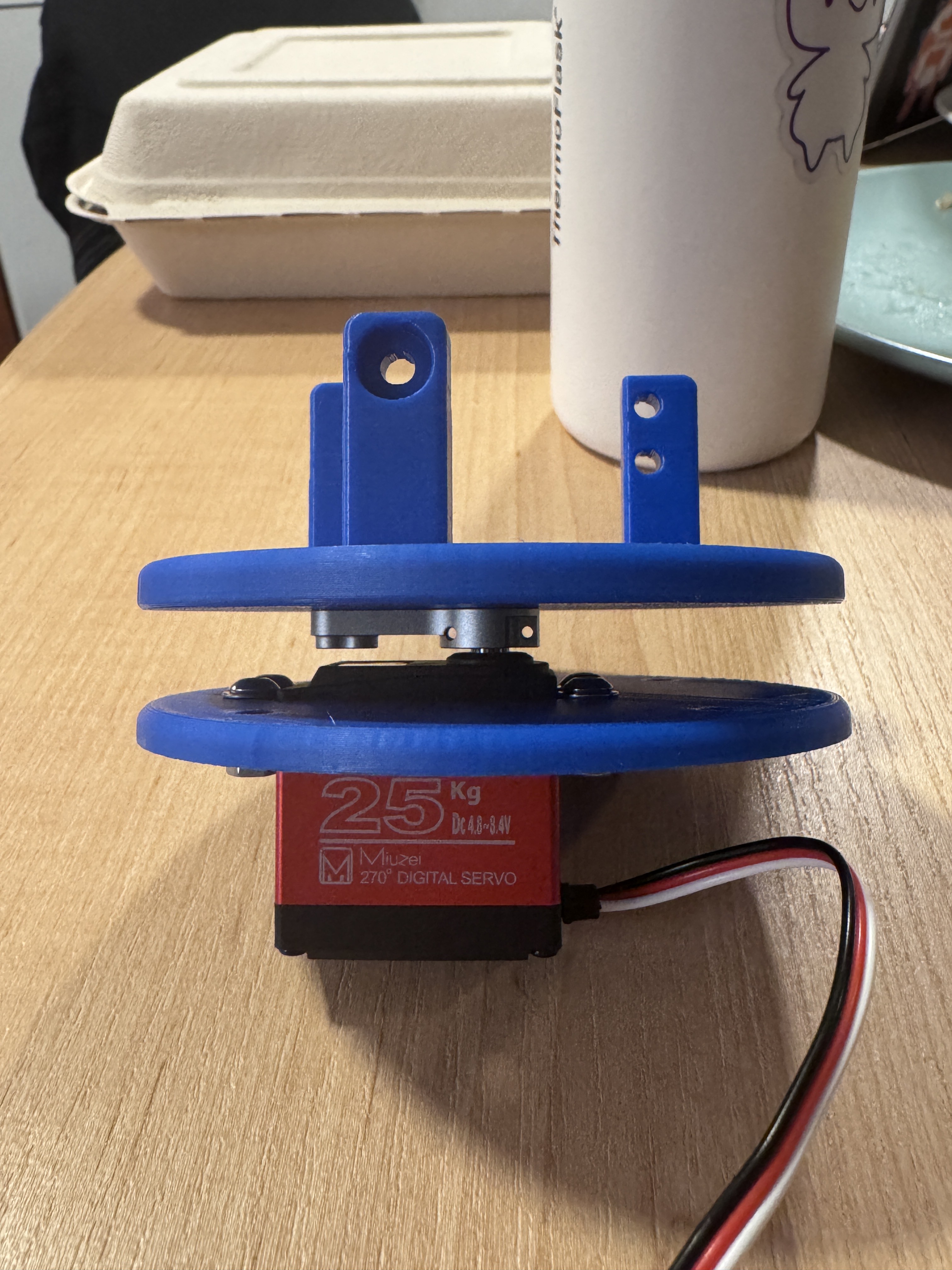
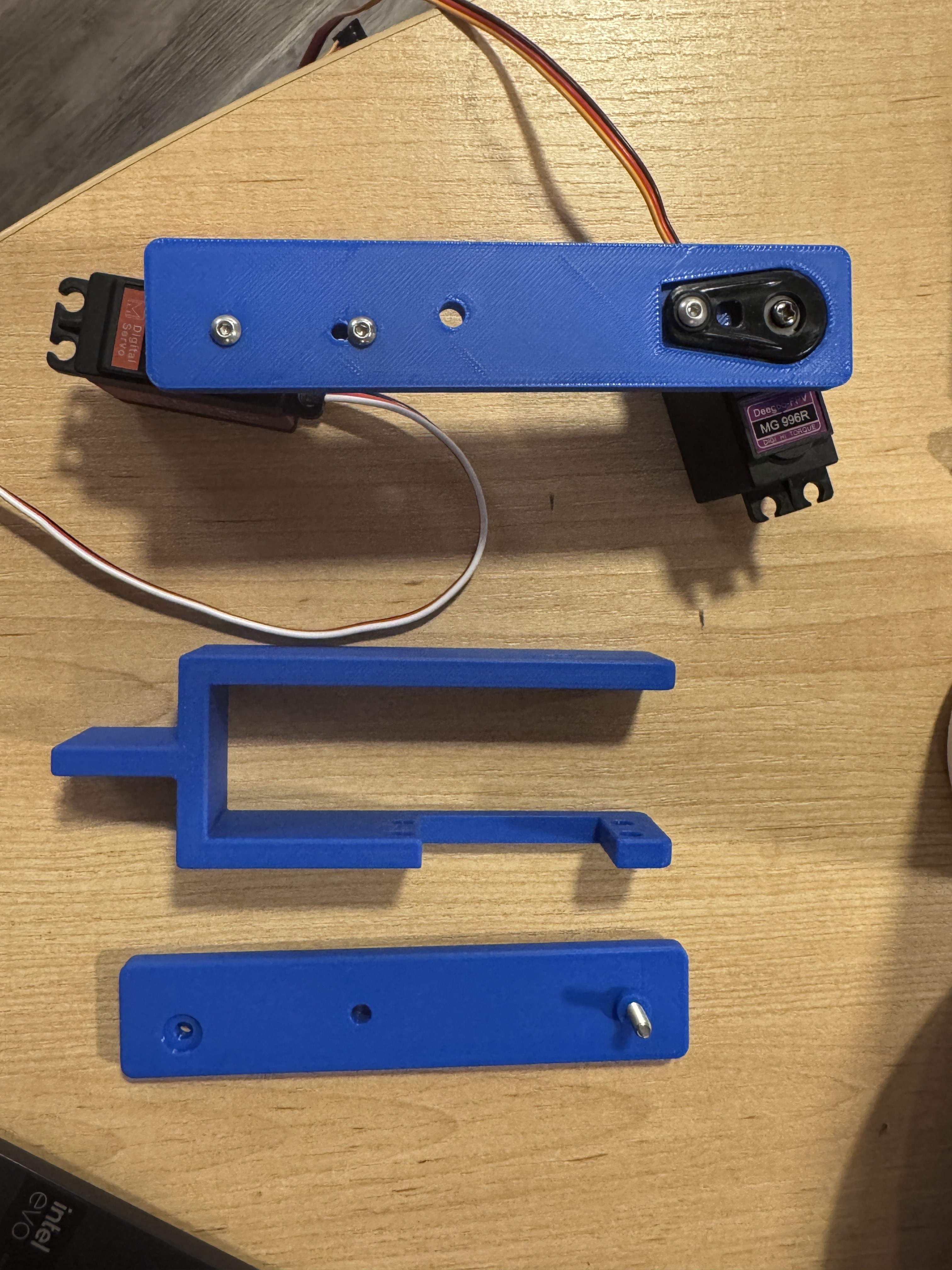
Luis, Chloe, OlaWe've been printing our CAD files for the arms, but have needed to reprint a few times to adjust tolerances and other small details. We're currently working on adding notches to the servo mounts and making counterbores for some of the nuts. We're also making spacers to make the assembly more stable.
The servos have also arrived! We've tested them with potentiometers, although there is a lot of noise. We tried adding a capacitor and exponential-moving-average filter, but they failed to decrease the noise, so we'll continue testing.
Below are some pictures of current prints! Although we have to update some.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.