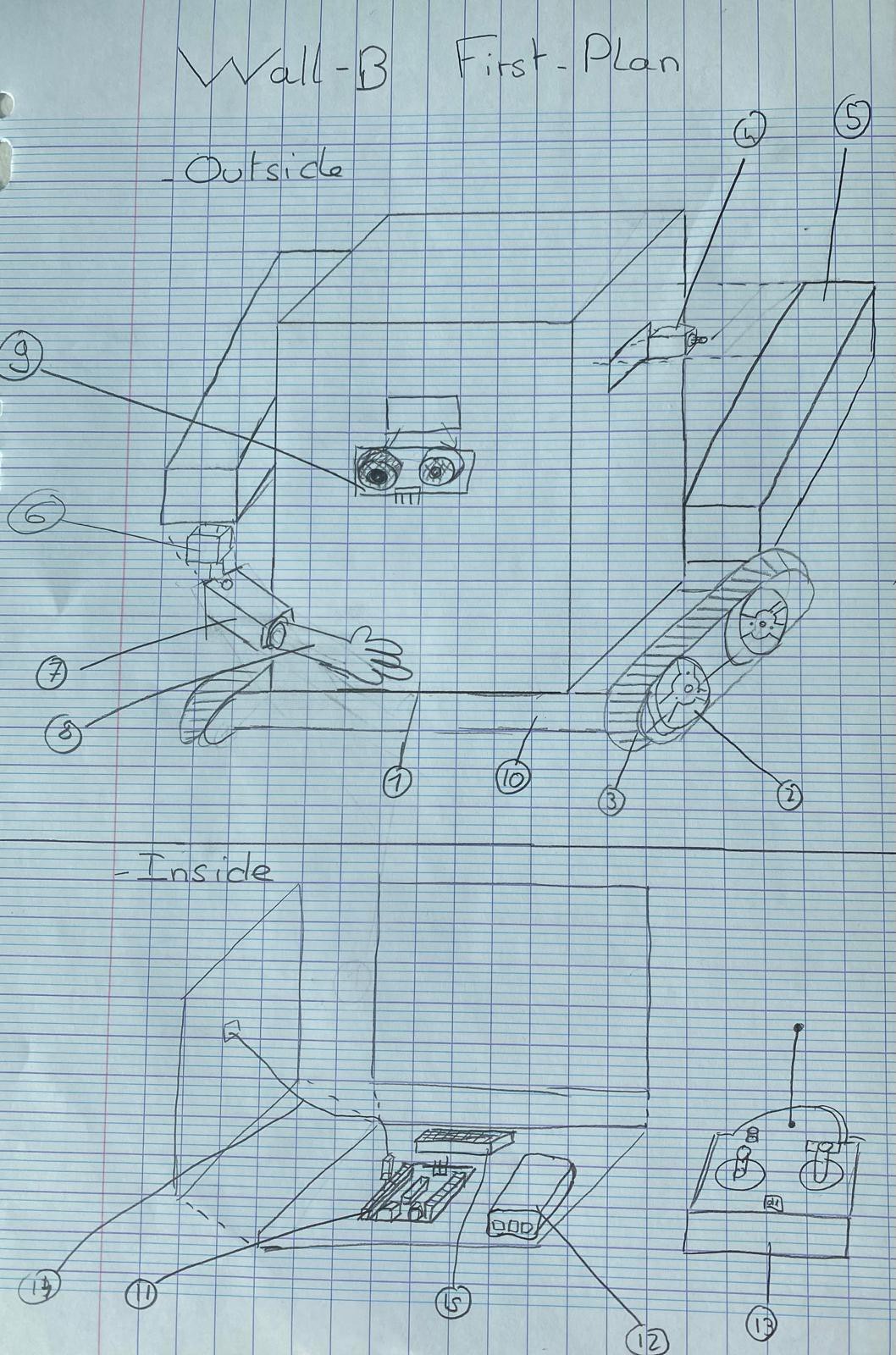
Today, we focused on developing a functional prototype for WALL-B, particularly working on the robotic arm. Using an Arduino setup, we successfully implemented basic movement for the arm, testing its responsiveness and control. While the structure is still a rough prototype, this marks a significant step in refining the robot’s mechanics. Additionally, we sketched an initial design plan outlining both the exterior and internal components of WALL-B. Moving forward, we aim to enhance stability and improve the precision of movements.

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.