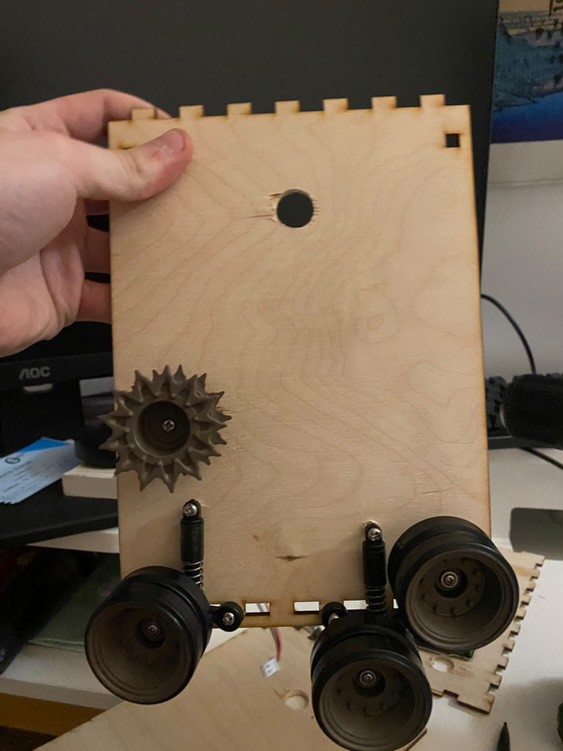
Today, we focused on assembling the drive system and wiring the electronics for WALL-B. We began by mounting the wheels and shock absorbers to ensure the robot has a stable and balanced structure. Precision was key, especially while drilling holes and securing the suspension system.
Next, we moved on to the wiring of the motor system. Each motor was connected and tested individually, ensuring smooth operation and responsiveness. Our design also required careful alignment of the gears and motor shafts, which was achieved with slight adjustments and secure mounting.
Once the mechanical structure was in place, we connected the main control board, tested the motor control, and adjusted the wiring for a clean, organized layout. This phase allowed us to verify that all systems were functioning correctly and that the robot was capable of basic movements.





Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.