 Nasser
NasserThe goal of this project is to build a spherical chessboard where a robotic arm on a circular track physically plays the moves from an online game.
Here is a rough sketch of what we want the final build to look like:
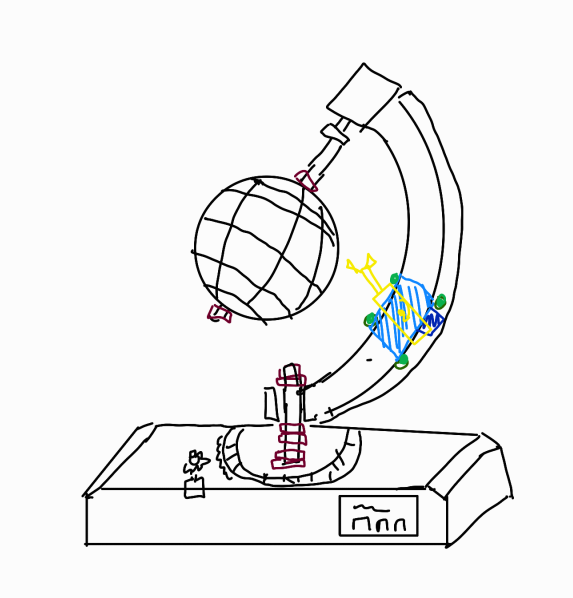
The long-term plan is to build several of these boards across our different school campuses for remote play. When a player makes a move, the arm on the opponent's board will replicate it in real time.
Our main inspiration is the OrbChess by NKD Puzzle: OrbChess – NKD Puzzle.

We decided to tackle the software first : the game itself, the server, and the networking before diving into the hardware.
Here is our tech stack:
- ESP32-DevKitC-32E: The main controller for the board.
- GameMaker Studio: Used to build the chess game client.
- Python with WebSockets: Used to build the real-time game server.
It's a heavy project since it covers IoT, mechanical design, game dev, and networking all at once.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.