 Nasser
NasserThe goal of this project is to create a spherical chessboard where moves are played by a small robotic arm moving along a circular track.
The robotic arm will execute the moves made by players in an online chess game.
Here is a rough draft of our vision for the final product :
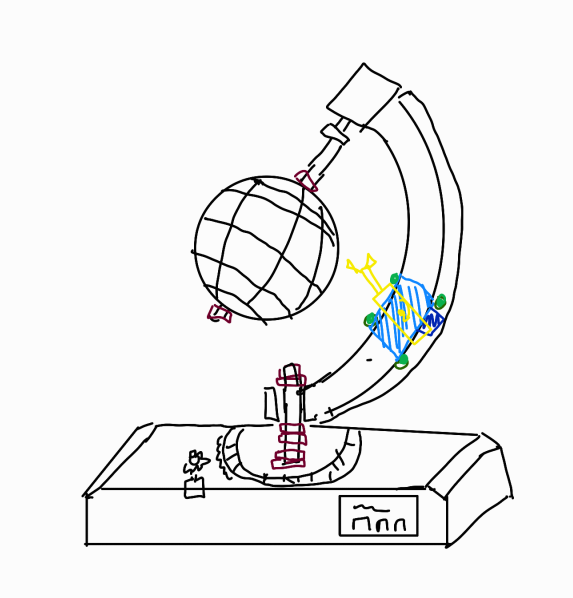
Our broader vision is to build multiple chessboards across different campuses of our school, allowing players to compete remotely. Each robotic arm will replicate the moves made by players in real-time on their respective boards.
Our main inspiration is the OrbChess by NKD Puzzle: OrbChess – NKD Puzzle.

We will first focus on the software aspects of the project—the chess game, game server, networking, etc.—before moving on to the hardware.
For the implementation:
- We'll use an ESP32 DevKit (full pinout) as the brain of the chessboard.
- GameMaker Studio will be used to develop the chess game.
- The game server will be built with Python using WebSockets for real-time communication.
This project is ambitious as it covers IoT, mechanical design, game development, and networking.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.