 Nasser
NasserOnce we finished the online game and server, and could send data to the ESP32 (the brain of the chessboard), we started designing the physical board. After brainstorming, we landed on this design:
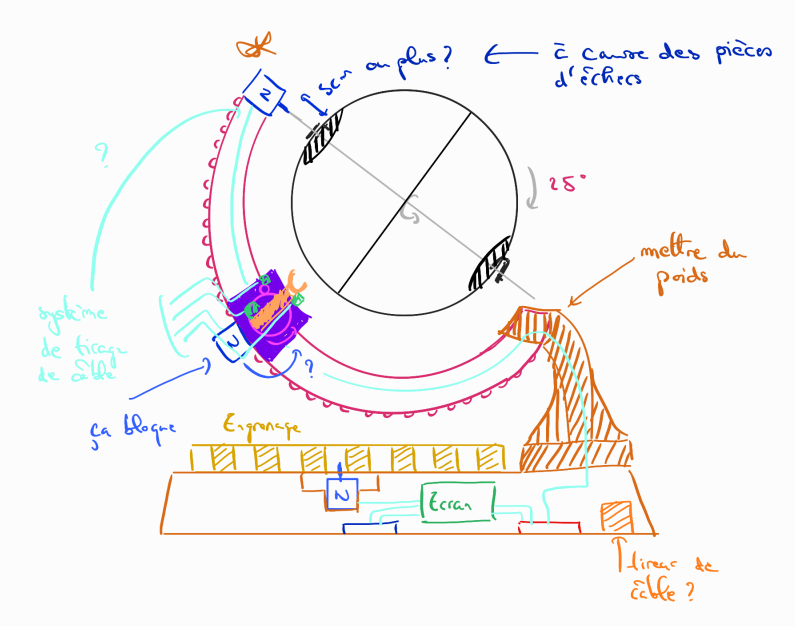
Design Specs
- Sphere: 20 cm diameter, tilted at 25°, 3D printed.
- Chess Pieces: 60 mm tall, held by magnets, 3D printed.
- Rail: Multiple layers of laser-cut wood and acrylic.
- Motors: 3 steppers (sphere, capture zone, and rail cart), 1 linear actuator, and 2 servos (actuator rotation and gripper).
- UI: A small screen for info and configuration.
How it Works We treat the sphere like a flat plane. Rotating the sphere moves through the files, and moving the cart along the rail moves through the ranks.
Executing a Move
- Aligning: The cart moves along the rail and the sphere rotates to line up the gripper with the piece.
- Grabbing: The linear actuator extends, the gripper closes on the piece, and the actuator retracts.
- Transport: The cart and sphere move to the target square.
- Placing: The actuator extends, and the gripper opens to release the piece.
Handling Captures The cart moves to a fixed spot over the capture zone : a rotating disc at the bottom. The actuator rotates and extends to place the piece in a slot. The zone then rotates to clear space for the next piece.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.