 mircemk
mircemkA typical VU meter measures audio signals and displays them with a visual indicator. In the classic VU meter design is used a moving needle (actually a sensitive galvanometer) that points to a scale on a calibrated range.

The needle moves left or right depending on the strength of the audio signal. I recently acquired these small round TFT displays with a GC9A01 chip. Its basic purpose is for making smart watches, but in fact their shape is ideally suited for making a retro-look VU meter. My attention was drawn to a project on thesolaruniverse blog, which describes in detail how to create meters gauges and dials on this display with arduino nano.
For the needs of this project I made some modifications to the code but basically kept the beautiful retro design and colors. Now, instead of random values, the instrument shows the real values of the voltage applied to the input pin of the microcontroller. For a more homogeneous movement of the needle, I now use a more powerful ESP32 microcontroller.

This project is sponsored by PCBWay. This year, PCBWayis organizing the 11th badge design contest from March 3rd to April 31st. Follow the design requirements and Submit your designs in one of the given ways, and become the winner of one of the valuable prizes in cash and cupons. This contest is more than a competition—it’s a celebration of 11 years of innovation and a chance to dream about the boundless possibilities ahead with PCBWay.

Nowadays the price of ESP32 is very low, so for better separation of the channels I decided to use a separate microcontroller for each channel. In this project I also added a peak meter that signals the moment of exceeding the permitted level of the signal with an LED.
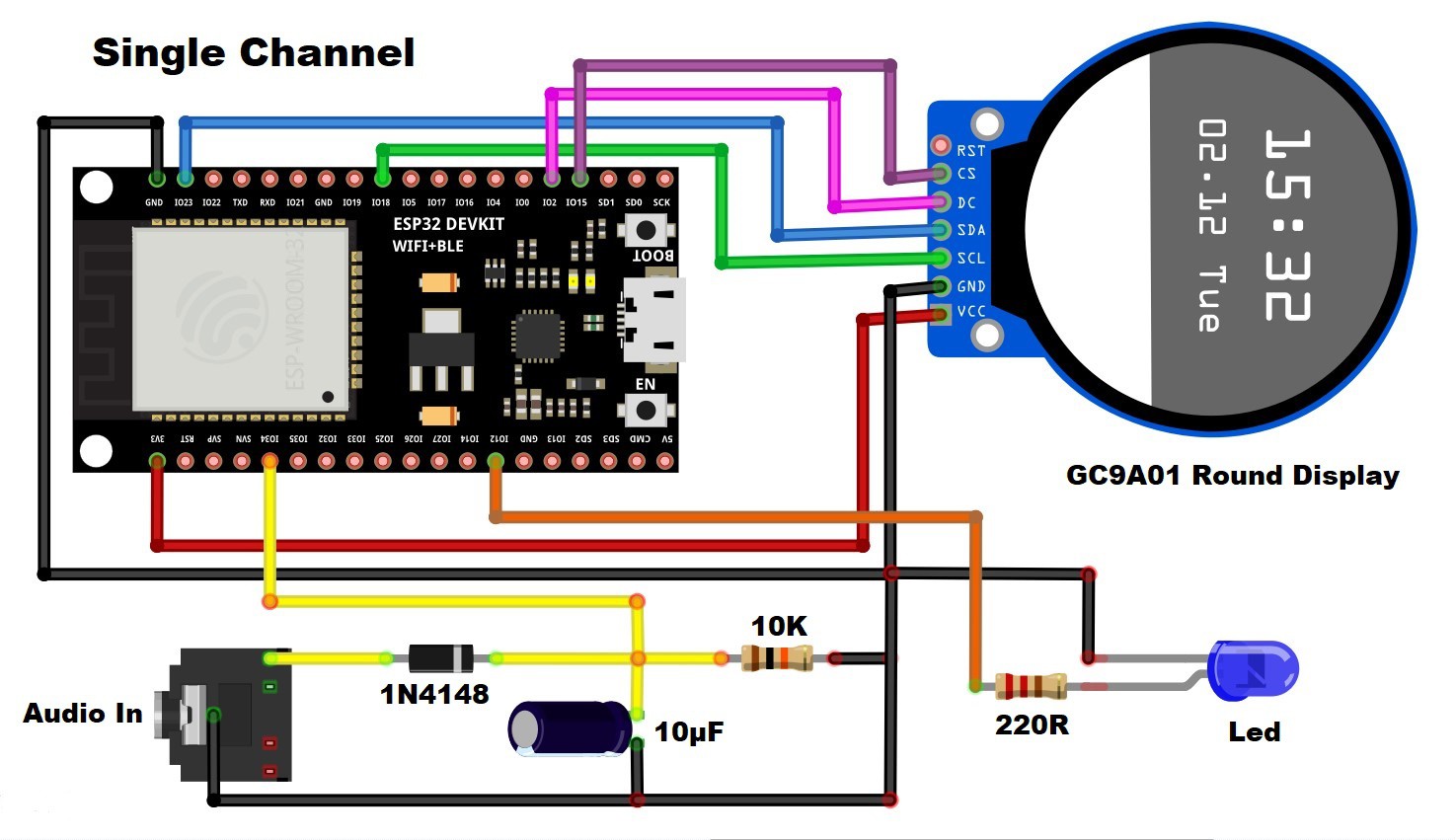
The device is very simple to make and consists of several components:
- ESP32 microcontroller - two pieces
- Two round displays with GC9A01 and 240x240 resolution
- envelope followers made with two small signal diodes and two capacitors
- and two leds with current limiting resistors

In particular, in this case I use the simplest passive envelope follower consisting of a diode and a capacitor, because the whole device is mainly intended as a demo device for testing, and based on this idea, a precise, fully functional audio VU meter can be made later with certain software and hardware modifications.
And now let's see how this VU meter works in real conditions.

Let me mention that a stereo potentiometer can be placed on the input in order to regulate the signal level, but for the sake of simplification I do it with the Windows mixer software.
And finally a short conclusion: This small, simple and interesting arduino project can be made in a few hours, and has a beautiful retro look, so you can use it as an additional part of any audio device, or as a stand-alone unit. With minimal code modification it can be used on many other devices (eg radio receiver) where signal strength measurement is required. The Vu meter is built in a suitable plastic box made of PVC material and lined with self-adhesive colored wallpaper.
Code for Left Channel:
// GCA901_Nano_voltage_meter
//
// grid voltage variation monitor (230V - 250V AC)
// rolling averaged voltage (of 10 readings) is sent to display
// NOTE: here voltage generated with random function
//
// microcontroller: Arduino Nano
// display 240*240 circular SPI 3.3V TFT with GC9A01 controller
//
// note: random function drives fluctuations of the parameter named 'volt'
// CG9A01 Arduino Nano
// RST -------- NC
// CST -------- 10
// DC --------- 9
// SDA -------- 11 - green wire
// SCL -------- 13 - yellow wire
//
// Floris Wouterlood
// September 1, 2023
// public domain
// made for a 240*240 pixel circular display
// all x-y-coordinates relative to center = x = 120 and y = 120
#include "SPI.h"
#include "Adafruit_GFX.h"
#include "Adafruit_GC9A01A.h"
#define TFT_DC 2
#define TFT_CS 15
Adafruit_GC9A01A tft (TFT_CS, TFT_DC);
#define BLACK 0x0000 // some extra colors
#define BLUE 0x001F
#define RED 0xF800
#define GREEN 0x07E0
#define CYAN 0x07FF
#define MAGENTA 0xF81F
#define YELLOW 0xFFE0
#define WHITE 0xFFFF
#define ORANGE 0xFBE0
#define GREY 0x84B5
#define BORDEAUX 0xA000
#define AFRICA 0xAB21 // 0xce5f //0xAB21 // current dial color
const int vlez = 34;
#define DEG2RAD 0.0174532925
//int vlez;
int sig = 0;
int multiplier;
int frametime = 100;
int x_pos;
int y_pos;
int center_x = 120; // center x of dial on 240*240 TFT display
int center_y = 120; // center y of dial on 240*240 TFT display
float pivot_x, pivot_y,pivot_x_old, pivot_y_old;
float p1_x,p1_y,p2_x,p2_y,p3_x, p3_y, p4_x, p4_y, p5_x, p5_y;
float p1_x_old,p1_y_old, p2_x_old, p2_y_old, p3_x_old, p3_y_old;
float p4_x_old, p4_y_old, p5_x_old, p5_y_old;
float angleOffset = 3.14;
float arc_x;
float arc_y;
int radius = 120; // center y of circular scale
float angle_circle = 0;
float needleAngle = 0;
int iteration = 0;
int j;
float volt = 220;
int needle_multiplier = 1;
float needle_setter;
float currentNeedleValue = 230; // Start with a base voltage or level
float needleSpeed = 10; // Speed at which the needle returns to the left
// to start with
void setup() {
//randomSeed (analogRead(0));
pinMode(12, OUTPUT);
pinMode(vlez, INPUT);
tft.begin();
Serial.begin (9600);
Serial.println ("");
Serial.println ("");
tft.setRotation (0);
tft.fillScreen (BLACK);
tft.drawCircle (center_x, center_y,120, BLACK);
pivot_x = center_x;
pivot_y = center_y+50;
p1_x_old = center_x; p1_y_old = center_y+50;
p2_x_old = center_x; p2_y_old = center_y+50;
p3_x_old = center_x; p3_y_old = center_y+50;
p4_x_old = center_x; p4_y_old = center_y+50;
p5_x_old = center_x; p5_y_old = center_y+30;
create_dial ();
needle_setter = volt;
needleAngle = (((needle_setter)*DEG2RAD*1.8)-3.14);
needle();
draw_pivot ();
}
void loop (){
// Map the analog input (voltage) to the needle range
float targetNeedleValue = map(analogRead(vlez), 0, 400, 230, 270);
Serial.println(targetNeedleValue);
sig = analogRead(vlez);
if (sig > 280) {digitalWrite(12, HIGH);} else {digitalWrite(12, LOW);}
// If the target value is greater than the current needle position, move quickly
if (targetNeedleValue > currentNeedleValue) {
currentNeedleValue = targetNeedleValue;
}
// If the target value is lower, move more slowly to simulate damping
else if (targetNeedleValue < currentNeedleValue) {
currentNeedleValue -= needleSpeed; // Decrease the value gradually
if (currentNeedleValue < targetNeedleValue) {
currentNeedleValue = targetNeedleValue; // Ensure we don't overshoot
}
}
// Update the needle position
needle_setter = currentNeedleValue;
needle();
draw_pivot();
delay(frametime); // Control the update rate
}
void needle (){ // dynamic needle management
tft.drawLine (pivot_x, pivot_y, p1_x_old, p1_y_old, AFRICA); // remove old needle
tft.fillTriangle (p1_x_old, p1_y_old, p2_x_old, p2_y_old, p3_x_old, p3_y_old, AFRICA); // remove old arrow head
tft.fillTriangle (pivot_x, pivot_y, p4_x_old, p4_y_old, p5_x_old, p5_y_old, AFRICA); // remove old arrow head
needleAngle = (((needle_setter)*0.01745331*1.8)-3.14);
p1_x = (pivot_x + ((radius)*cos(needleAngle))); // needle tip
p1_y = (pivot_y + ((radius)*sin(needleAngle)));
p2_x = (pivot_x + ((radius-15)*cos(needleAngle-0.05))); // needle triange left
p2_y = (pivot_y + ((radius-15)*sin(needleAngle-0.05)));
p3_x = (pivot_x + ((radius-15)*cos(needleAngle+0.05))); // needle triange right
p3_y = (pivot_y + ((radius-15)*sin(needleAngle+0.05)));
p4_x = (pivot_x + ((radius-90)*cos(angleOffset+(needleAngle-0.2)))); // needle triange left
p4_y = (pivot_y + ((radius-90)*sin(angleOffset+(needleAngle-0.2))));
p5_x = (pivot_x + ((radius-90)*cos(angleOffset+(needleAngle+0.2)))); // needle triange right
p5_y = (pivot_y + ((radius-90)*sin(angleOffset+(needleAngle+0.2))));
p1_x_old = p1_x; p1_y_old = p1_y; // remember previous needle position
p2_x_old = p2_x; p2_y_old = p2_y;
p3_x_old = p3_x; p3_y_old = p3_y;
p4_x_old = p4_x; p4_y_old = p4_y; // remember previous needle counterweight position
p5_x_old = p5_x; p5_y_old = p5_y;
tft.drawLine (pivot_x, pivot_y, p1_x, p1_y, BLACK); // create needle
tft.fillTriangle (p1_x, p1_y, p2_x, p2_y, p3_x, p3_y, BLACK); // create needle tip pointer
// tft.drawLine (center_x-80, center_y+70, center_x+80,center_y+70, BLACK); // repair floor
tft.fillTriangle (pivot_x, pivot_y, p4_x, p4_y, p5_x, p5_y, BLACK); // create needle counterweight
}
void create_dial (){
tft.fillCircle (center_x, center_y,120, AFRICA); // general dial field
tft.drawCircle (center_x, center_y,118,GREY);
tft.drawCircle (center_x, center_y,117,BLACK);
tft.drawCircle (center_x, center_y,116,BLACK);
tft.drawCircle (center_x, center_y,115,GREY);
for (j= 30; j<60 ; j+=5)
{
needleAngle = ((j*DEG2RAD*1.8)-3.14);
arc_x = (pivot_x + ((radius+15)*cos(needleAngle))); // needle tip
arc_y = (pivot_y + ((radius+15)*sin(needleAngle)));
tft.drawPixel (arc_x,arc_y, BLACK);
tft.fillCircle (arc_x,arc_y,2, BLACK);
}
for (j= 60; j<75 ; j+=5)
{
needleAngle = ((j*DEG2RAD*1.8)-3.14);
arc_x = (pivot_x + ((radius+15)*cos(needleAngle))); // needle tip
arc_y = (pivot_y + ((radius+15)*sin(needleAngle)));
tft.drawPixel (arc_x,arc_y, RED);
tft.fillCircle (arc_x,arc_y,2, RED);
}
tft.setTextColor (BLACK,AFRICA);
tft.setTextSize (4);
tft.setCursor (center_x+55, center_y+40);
tft.print ("L");
tft.setTextSize (4);
tft.setCursor (center_x-70, center_y+40);
tft.print ("VU");
// tft.drawLine (center_x-80, center_y+70, center_x+80,center_y+70, WHITE); // create floor
}
void draw_pivot (){
tft.fillCircle (pivot_x, pivot_y,8,RED);
tft.drawCircle (pivot_x, pivot_y,8,BLACK);
tft.drawCircle (pivot_x, pivot_y,3,BLACK);
}
Code for Right channel:
// GCA901_Nano_voltage_meter
//
// grid voltage variation monitor (230V - 250V AC)
// rolling averaged voltage (of 10 readings) is sent to display
// NOTE: here voltage generated with random function
//
// microcontroller: Arduino Nano
// display 240*240 circular SPI 3.3V TFT with GC9A01 controller
//
// note: random function drives fluctuations of the parameter named 'volt'
// CG9A01 Arduino Nano
// RST -------- NC
// CST -------- 10
// DC --------- 9
// SDA -------- 11 - green wire
// SCL -------- 13 - yellow wire
//
// Floris Wouterlood
// September 1, 2023
// public domain
// made for a 240*240 pixel circular display
// all x-y-coordinates relative to center = x = 120 and y = 120
#include "SPI.h"
#include "Adafruit_GFX.h"
#include "Adafruit_GC9A01A.h"
#define TFT_DC 2
#define TFT_CS 15
Adafruit_GC9A01A tft (TFT_CS, TFT_DC);
#define BLACK 0x0000 // some extra colors
#define BLUE 0x001F
#define RED 0xF800
#define GREEN 0x07E0
#define CYAN 0x07FF
#define MAGENTA 0xF81F
#define YELLOW 0xFFE0
#define WHITE 0xFFFF
#define ORANGE 0xFBE0
#define GREY 0x84B5
#define BORDEAUX 0xA000
#define AFRICA 0xAB21 // 0xce5f //0xAB21 // current dial color
const int vlez = 34;
#define DEG2RAD 0.0174532925
//int vlez;
int sig = 0;
int multiplier;
int frametime = 100;
int x_pos;
int y_pos;
int center_x = 120; // center x of dial on 240*240 TFT display
int center_y = 120; // center y of dial on 240*240 TFT display
float pivot_x, pivot_y,pivot_x_old, pivot_y_old;
float p1_x,p1_y,p2_x,p2_y,p3_x, p3_y, p4_x, p4_y, p5_x, p5_y;
float p1_x_old,p1_y_old, p2_x_old, p2_y_old, p3_x_old, p3_y_old;
float p4_x_old, p4_y_old, p5_x_old, p5_y_old;
float angleOffset = 3.14;
float arc_x;
float arc_y;
int radius = 120; // center y of circular scale
float angle_circle = 0;
float needleAngle = 0;
int iteration = 0;
int j;
float volt = 220;
int needle_multiplier = 1;
float needle_setter;
float currentNeedleValue = 230; // Start with a base voltage or level
float needleSpeed = 10; // Speed at which the needle returns to the left
// to start with
void setup() {
//randomSeed (analogRead(0));
pinMode(12, OUTPUT);
pinMode(vlez, INPUT);
tft.begin();
Serial.begin (9600);
Serial.println ("");
Serial.println ("");
tft.setRotation (0);
tft.fillScreen (BLACK);
tft.drawCircle (center_x, center_y,120, BLACK);
pivot_x = center_x;
pivot_y = center_y+50;
p1_x_old = center_x; p1_y_old = center_y+50;
p2_x_old = center_x; p2_y_old = center_y+50;
p3_x_old = center_x; p3_y_old = center_y+50;
p4_x_old = center_x; p4_y_old = center_y+50;
p5_x_old = center_x; p5_y_old = center_y+30;
create_dial ();
needle_setter = volt;
needleAngle = (((needle_setter)*DEG2RAD*1.8)-3.14);
needle();
draw_pivot ();
}
void loop (){
// Map the analog input (voltage) to the needle range
float targetNeedleValue = map(analogRead(vlez), 0, 400, 230, 270);
Serial.println(targetNeedleValue);
sig = analogRead(vlez);
if (sig > 280) {digitalWrite(12, HIGH);} else {digitalWrite(12, LOW);}
// If the target value is greater than the current needle position, move quickly
if (targetNeedleValue > currentNeedleValue) {
currentNeedleValue = targetNeedleValue;
}
// If the target value is lower, move more slowly to simulate damping
else if (targetNeedleValue < currentNeedleValue) {
currentNeedleValue -= needleSpeed; // Decrease the value gradually
if (currentNeedleValue < targetNeedleValue) {
currentNeedleValue = targetNeedleValue; // Ensure we don't overshoot
}
}
// Update the needle position
needle_setter = currentNeedleValue;
needle();
draw_pivot();
delay(frametime); // Control the update rate
}
void needle (){ // dynamic needle management
tft.drawLine (pivot_x, pivot_y, p1_x_old, p1_y_old, AFRICA); // remove old needle
tft.fillTriangle (p1_x_old, p1_y_old, p2_x_old, p2_y_old, p3_x_old, p3_y_old, AFRICA); // remove old arrow head
tft.fillTriangle (pivot_x, pivot_y, p4_x_old, p4_y_old, p5_x_old, p5_y_old, AFRICA); // remove old arrow head
needleAngle = (((needle_setter)*0.01745331*1.8)-3.14);
p1_x = (pivot_x + ((radius)*cos(needleAngle))); // needle tip
p1_y = (pivot_y + ((radius)*sin(needleAngle)));
p2_x = (pivot_x + ((radius-15)*cos(needleAngle-0.05))); // needle triange left
p2_y = (pivot_y + ((radius-15)*sin(needleAngle-0.05)));
p3_x = (pivot_x + ((radius-15)*cos(needleAngle+0.05))); // needle triange right
p3_y = (pivot_y + ((radius-15)*sin(needleAngle+0.05)));
p4_x = (pivot_x + ((radius-90)*cos(angleOffset+(needleAngle-0.2)))); // needle triange left
p4_y = (pivot_y + ((radius-90)*sin(angleOffset+(needleAngle-0.2))));
p5_x = (pivot_x + ((radius-90)*cos(angleOffset+(needleAngle+0.2)))); // needle triange right
p5_y = (pivot_y + ((radius-90)*sin(angleOffset+(needleAngle+0.2))));
p1_x_old = p1_x; p1_y_old = p1_y; // remember previous needle position
p2_x_old = p2_x; p2_y_old = p2_y;
p3_x_old = p3_x; p3_y_old = p3_y;
p4_x_old = p4_x; p4_y_old = p4_y; // remember previous needle counterweight position
p5_x_old = p5_x; p5_y_old = p5_y;
tft.drawLine (pivot_x, pivot_y, p1_x, p1_y, BLACK); // create needle
tft.fillTriangle (p1_x, p1_y, p2_x, p2_y, p3_x, p3_y, BLACK); // create needle tip pointer
// tft.drawLine (center_x-80, center_y+70, center_x+80,center_y+70, BLACK); // repair floor
tft.fillTriangle (pivot_x, pivot_y, p4_x, p4_y, p5_x, p5_y, BLACK); // create needle counterweight
}
void create_dial (){
tft.fillCircle (center_x, center_y,120, AFRICA); // general dial field
tft.drawCircle (center_x, center_y,118,GREY);
tft.drawCircle (center_x, center_y,117,BLACK);
tft.drawCircle (center_x, center_y,116,BLACK);
tft.drawCircle (center_x, center_y,115,GREY);
for (j= 30; j<60 ; j+=5)
{
needleAngle = ((j*DEG2RAD*1.8)-3.14);
arc_x = (pivot_x + ((radius+15)*cos(needleAngle))); // needle tip
arc_y = (pivot_y + ((radius+15)*sin(needleAngle)));
tft.drawPixel (arc_x,arc_y, BLACK);
tft.fillCircle (arc_x,arc_y,2, BLACK);
}
for (j= 60; j<75 ; j+=5)
{
needleAngle = ((j*DEG2RAD*1.8)-3.14);
arc_x = (pivot_x + ((radius+15)*cos(needleAngle))); // needle tip
arc_y = (pivot_y + ((radius+15)*sin(needleAngle)));
tft.drawPixel (arc_x,arc_y, RED);
tft.fillCircle (arc_x,arc_y,2, RED);
}
tft.setTextColor (BLACK,AFRICA);
tft.setTextSize (4);
tft.setCursor (center_x+40, center_y+40);
tft.print ("VU");
tft.setTextSize (4);
tft.setCursor (center_x-60, center_y+40);
tft.print ("R");
// tft.drawLine (center_x-80, center_y+70, center_x+80,center_y+70, WHITE); // create floor
}
void draw_pivot (){
tft.fillCircle (pivot_x, pivot_y,8,RED);
tft.drawCircle (pivot_x, pivot_y,8,BLACK);
tft.drawCircle (pivot_x, pivot_y,3,BLACK);
}