 Baaqer Farhat
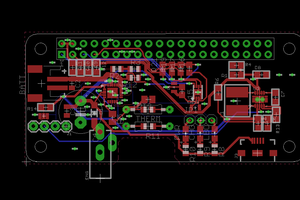
Baaqer FarhatThe system consists of a chassis and a swapping station, both of which are integrated and controlled through a combination of a Raspberry Pi 4B, Arduino Nano, and Arduino R4. The Raspberry Pi 4B serves as the central controller, managing overall communication and computation. It directly interfaces with the Arduino Nano, which is responsible for controlling the chassis components, including the main motors, ultrasonic sensors, and gyroscope. The Raspberry Pi and Arduino Nano are connected via a direct wired interface, ensuring reliable and low-latency communication.
The battery-swapping station is controlled by an Arduino R4, which manages the rack-and-pinion mechanism used to extend towards the battery compartment of the EV. Additionally, the station includes a rotating base, allowing it to efficiently swap depleted batteries with fully charged ones. Communication between the Arduino R4 and Raspberry Pi is facilitated through a server hosted on the Raspberry Pi, ensuring seamless coordination between the chassis and swapping station.
To enhance functionality and monitoring, the system also features a web application that provides a live visualization of the vehicle's path using Dijkstra’s algorithm. This web app enables real-time tracking and optimization of the vehicle's navigation, ensuring efficient movement between stations and accurate positioning for battery swapping. The combination of autonomous hardware control, real-time communication, and live web-based monitoring makes this system a robust and efficient solution for EV battery swapping.
 Mr. Spriggs
Mr. Spriggs


 Jake Meyer
Jake Meyer