 Michal
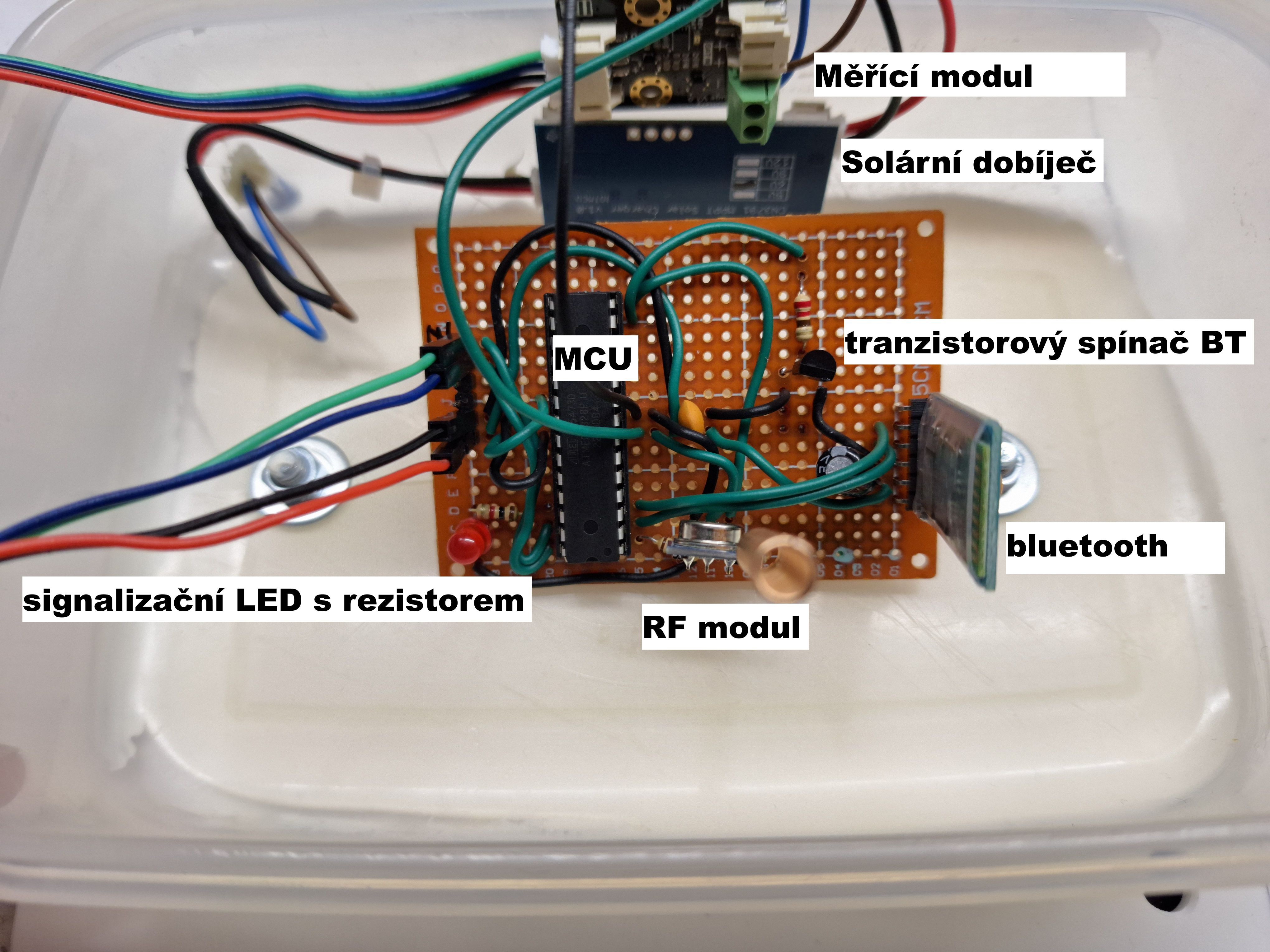
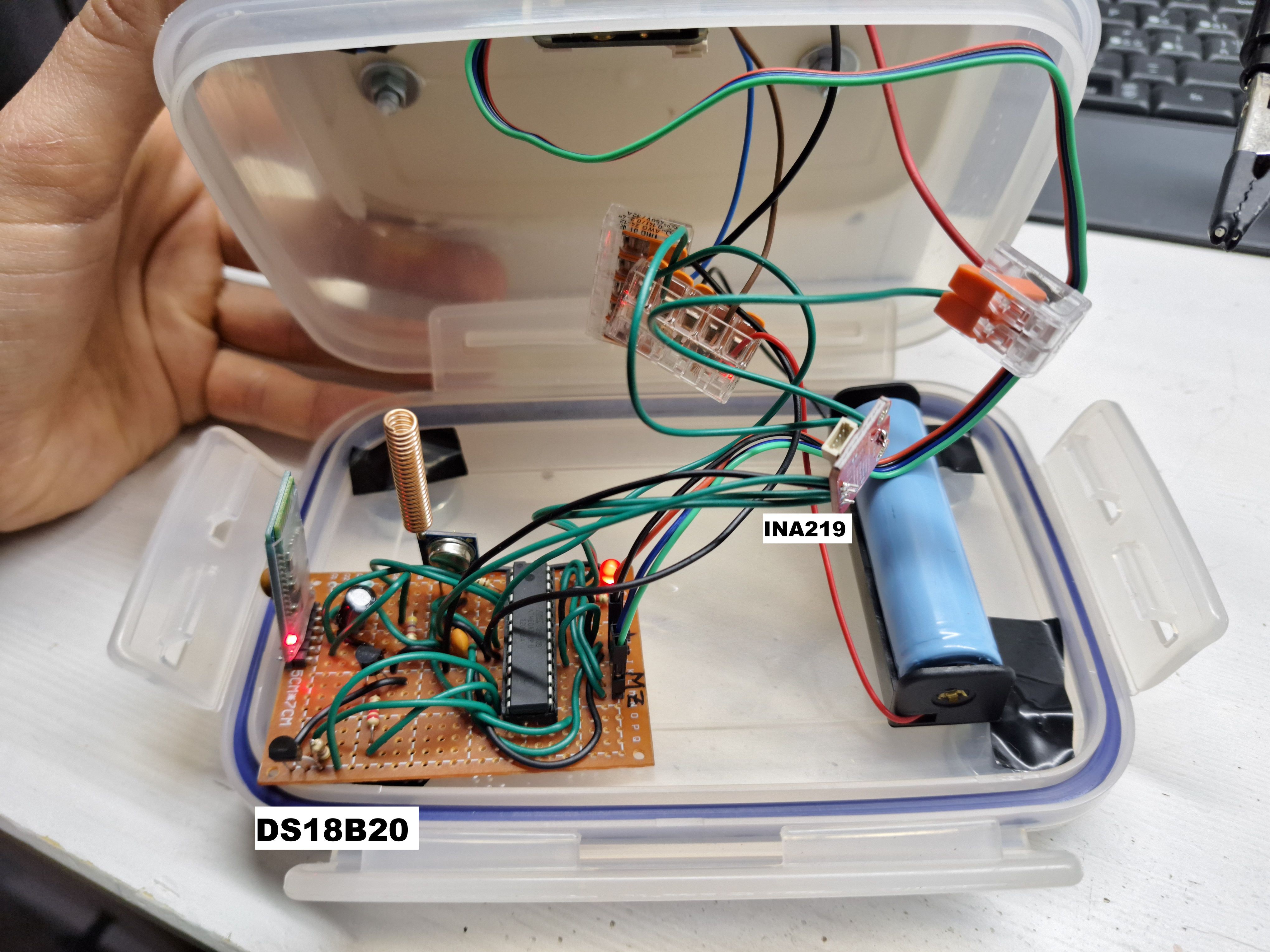
MichalThe brain of the entire NEDsat is the Arduino UNO, or rather its ATmega328P chip clocked at 8MHz by an internal oscillator and powered directly from the battery.
The following sensors are used to measure the NEDsat parameters: DFRobot Gravity with a MAX17043 chip, which measures the battery status in mV and %; DS18B20 for temperature measurement and INA219 for measuring the current from the panel.
The primary communication is the SRX882 RF module at 433MHz, which transmits the battery status in the form of PWM pulses (1 pulse = 5%) - I use an SDR receiver to capture the transmission.
Furthermore, if the battery charge is more than 50%, the RF transmission is followed by the activation of the HC-05 Bluetooth module and the transmission of the battery status in % and mV and the system temperature.
There is also one LED that flashes to the rhythm of the RF transmission and signals the activation of Bluetooth, a couple of capacitors for power supply and a pull-up resistor on the MCU reset pin.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.