 Bertrand Selva
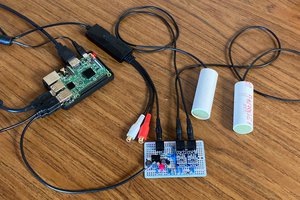
Bertrand SelvaThis project presents a compact, affordable system capable of determining the direction and elevation of a sound source using a Raspberry Pi Pico microcontroller.
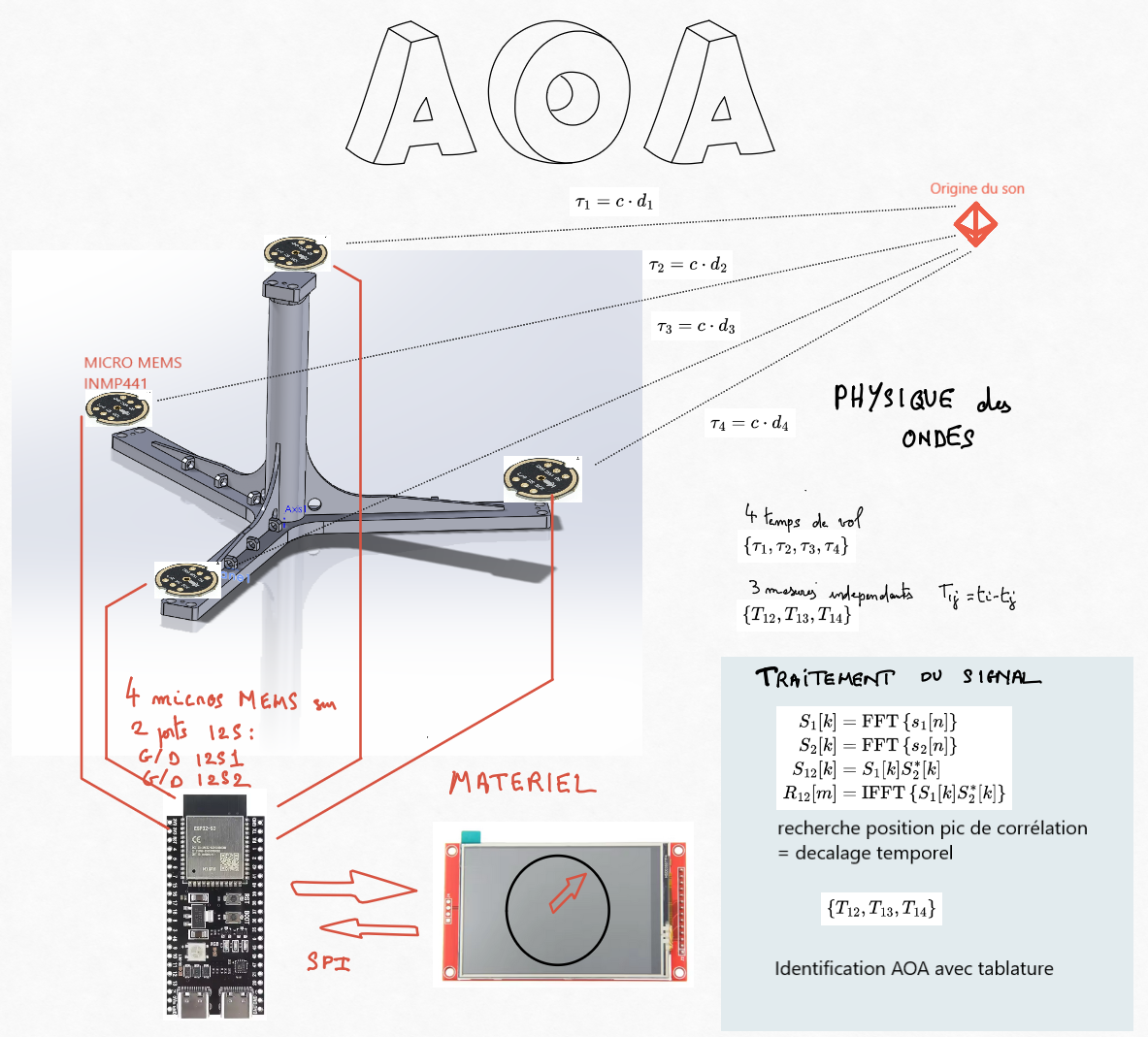
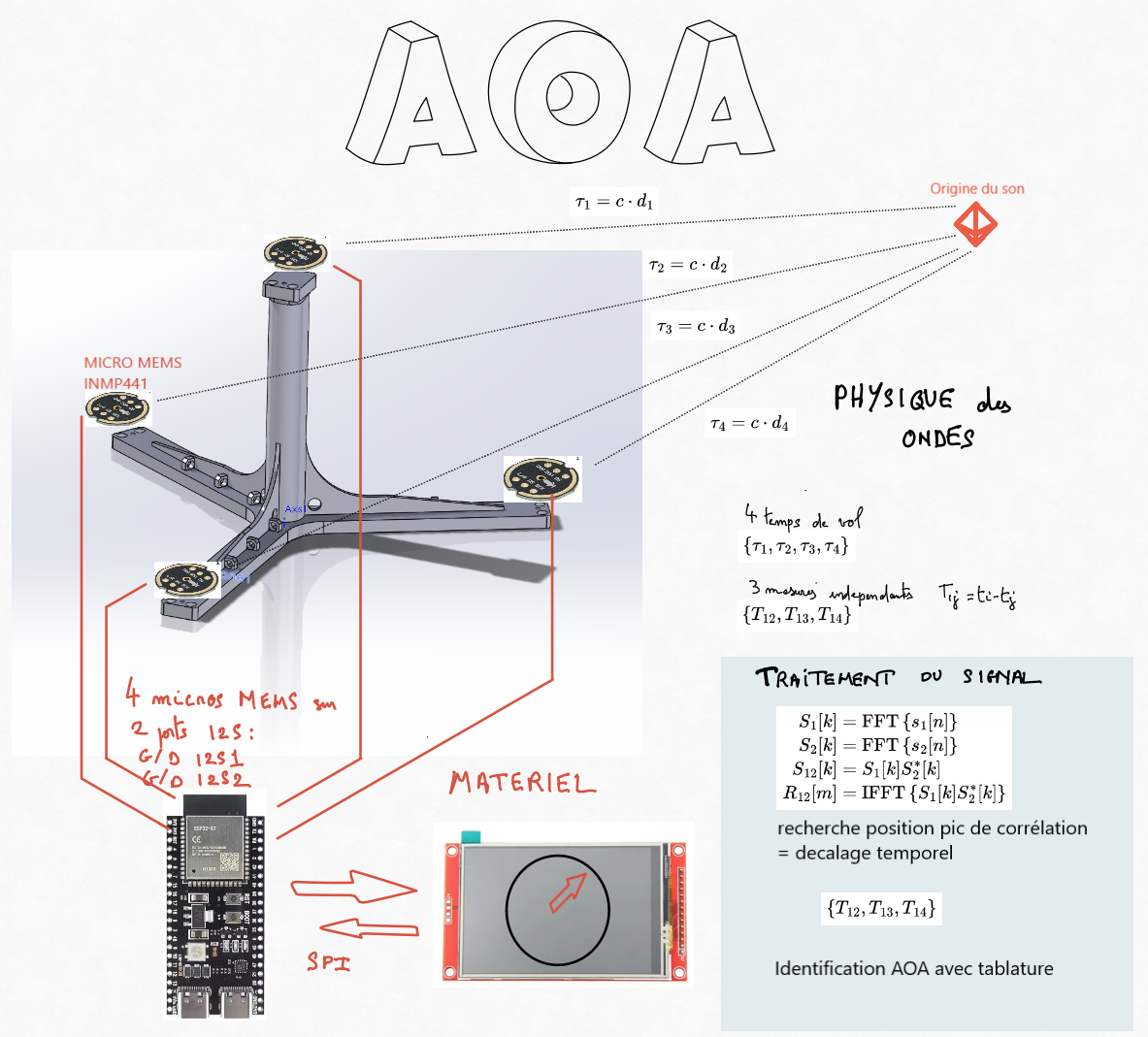
Operational Mechanics
Upon detecting a sufficiently loud sound, the system:
-
Captures audio signals from all four microphones.
-
Applies Fast Fourier Transforms (FFT) to convert time-domain signals into the frequency domain.
-
Computes cross-correlations between microphone pairs in the frequency domain using the formula:
R(τ) = INV_F{F{x(t)} · F{y(t)}*}
where F denotes the Fourier Transform, INV_F its inverse, and * indicates the complex conjugate.
-
Identifies time delays by locating the maxima in the cross-correlation functions.
-
Determines the sound source's direction by referencing a precomputed lookup table based on these delays.
-
Displays the result on the touchscreen, indicating the direction with a graphical pointer.
This method offers computational efficiency with a complexity of O(n log n), suitable for real-time processing on resource-constrained hardware.
Demonstration
A demonstration video showcases the system's responsiveness, with processing times of just a few hundred milliseconds. The red LED indicates the processing phase, and the touchscreen provides immediate visual feedback on the detected sound direction.
Limitations
-
Static Sound Sources: The system assumes stationary sound sources; moving sources can introduce inaccuracies due to unknown velocities.
-
Single Source Detection: Designed for single-source scenarios; multiple simultaneous sources may complicate localization.
Potential Enhancements
-
ESP32 Integration: Utilizing an ESP32 microcontroller with I2S ports and DSP capabilities can enhance performance and allow the use of MEMS microphones.
-
LoRa Communication: Implementing LoRa modules enables multiple units to communicate, facilitating triangulation over larger areas.
-
Drone Deployment: Mounting the system on drones can provide rapid, wide-area sound source localization.
-
Deep Learning for Sound Classification: Incorporating neural networks can allow the system to classify different sound types, such as distinguishing between gunshots, machinery noise, or human voices.
Applications
This low-cost, efficient system has potential applications in:
-
Robotics: Enhancing environmental awareness through sound direction detection.
-
Security: Detecting and localizing unusual sounds in surveillance scenarios.
-
Search and Rescue: Locating individuals in distress through sound cues
Example of On-Device Deep Learning Classification
A keyword spotting application showcasing this approach is presented in the following video:
This demonstration is based on a neural network with a few thousand parameters, capable of performing one inference every 250 ms on an ESP32 microcontroller. It is detailed in the Deep Learning section of the website: selvasystems.net
Such a model can easily be adapted to detect specific sound signatures (screams, impacts, engines) and combined with localization to enrich the analysis.



 Noman Shah
Noman Shah
 Raymond Lutz
Raymond Lutz
 Gregory
Gregory
Thank you for your feedback on the project.
Indeed, if you only need detection in the horizontal plane, you can limit yourself to just three microphones. With three microphones, you get two time-difference-of-arrival (TDOA) measurements, which gives you two parameters. That is sufficient to solve for the two spatial coordinates (x and y).
Using an FFT is not mandatory. The processing here is quite straightforward (it was a first try) : I use the full signal bandwidth. A time-domain correlation would work in the same way. I chose to use the FFT to compute the correlation in order to speed up the computation (Pi Pico is slow). Working in the frequency domain reduces the computational complexity.
The detection range mainly depends on the microphone’s signal-to-noise ratio. As long as the three microphones can clearly hear the sound, the system will work. I would say a few meters in practice.