 Apollo Timbers
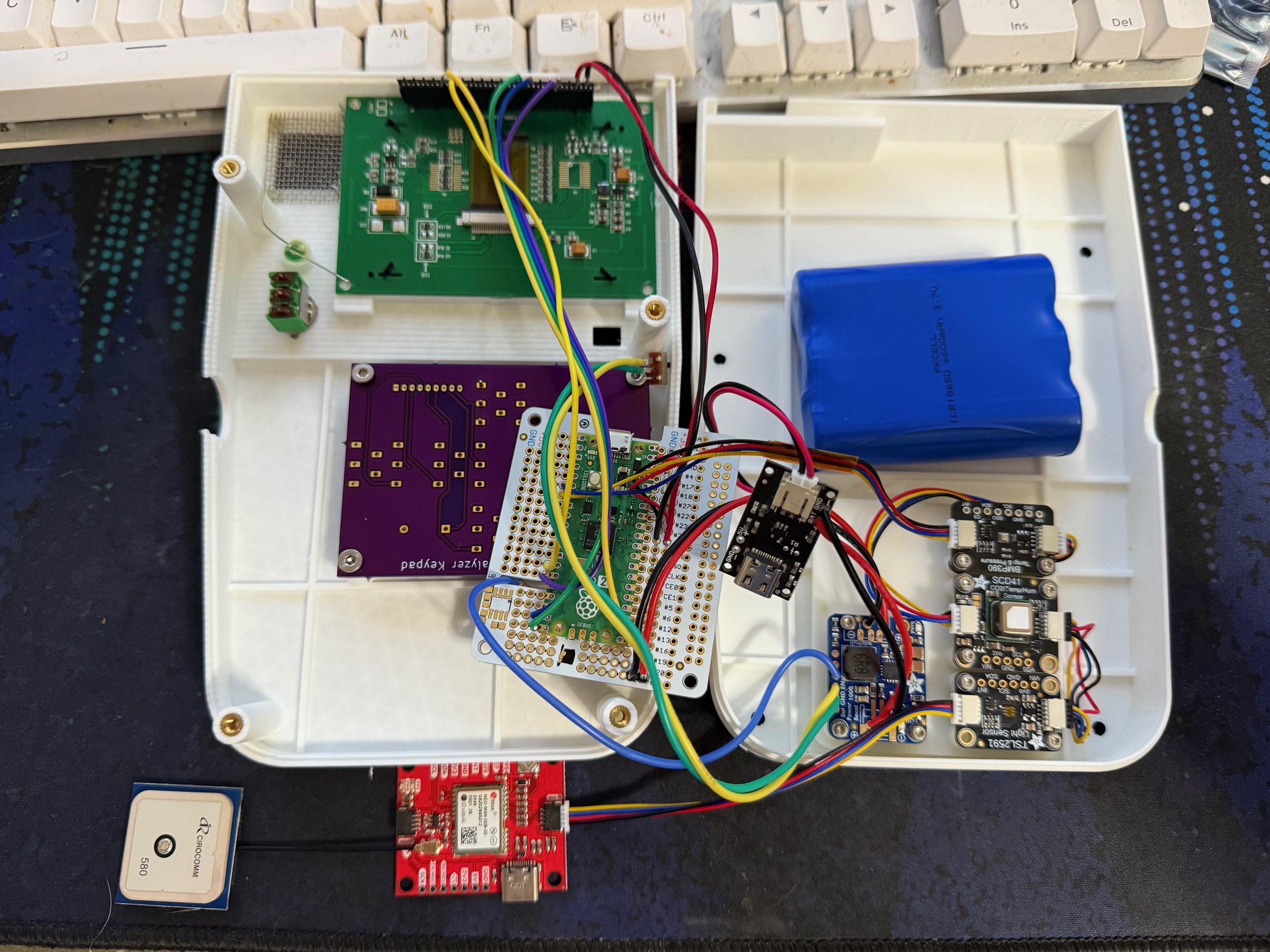
Apollo TimbersAs of today, the AI Field Analyzer finally fits inside its case. This marks the first full hardware integration milestone: all core sensors are live, the display is working, GPS is fused and parsed in real time, and the device is now portable and testable in real-world environments. That said, the case is still temporary. Most modules are loosely fitted, and I’ll need to create custom PCBs and proper mounts to secure things long-term. But this is a key checkpoint.. it’s no longer a dev board taped to a battery. It’s becoming a proper field tool.
I’ve also migrated everything to the Raspberry Pi Pico 2, (what a pain in the axx!!) which gave me extra RAM and CPU headroom needed to implement GPS anti-spoofing/jamming, altitude fusion, environmental logic, and a full diagnostic framework (ish).
One of the biggest challenges in this update was tuning the location detection logic. Getting the right balance between CO₂ levels, lux, humidity, and GPS speed wasn’t as straightforward as it sounds. Early versions constantly flipped between states, especially indoors near windows or while driving. I had to weight each sensor’s influence carefully and add sticky state logic for VEHICLE mode to prevent false switches when stopping at lights or losing signal momentarily.
Not everything is online yet: the SD card was lost during testing, so logging is offline until I add a new breakout. The Geiger radiation sensor is also shelved for now... it works, but it needs a dedicated co-processor to handle accurate pulse timing without overloading the main loop.
Bad News...
The AI Coral board and 5MP camera will have to wait, while I miniaturize the sensor and main PICO2 board. I also may need to resort to a Li-poly battery. I'm not happy about that, as I was trying to reduce fire risk.
v2.5 Feature Highlights:
-
GPS over I²C with real-time NMEA parsing
-
Anti-spoofing logic using satellite quality, HDOP, fix type, and motion behavior
-
Pressure fusion to validate GPS altitude using BMP390
-
Jam detection via GPS silence combined with stable sensor input
-
Major logic re-written for (INDOOR, OUTDOOR, CAVE, VEHICLE) with weight tuning and more
-
Sticky vehicle mode for stop-and-go travel accuracy
-
Temperature fusion using BMP390 and SCD41 for stable ambient readings
-
Sensor health monitoring, timeouts, and adaptive polling
-
Fully enclosed (temporary) case milestone (I have some work to go)
-
SD logging temporarily offline (the swap to the Pico 2 required me to get a SD card SPI reader breakout)
-
Radiation detection on hold pending co-processor integration
v2.5 code will be posted soon as I have some final cleanup to do.
For the integration, I 3D printed a sensor mounting plate and made a custom low profile PICO2 main board.

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.