 Mark Makies
Mark MakiesWith the boost in torque and power, and thanks to some wet, slippery and soft ground, we hit a new problem: loss of traction.
 I’ve never designed tyres before, so I took inspiration from tractor treads, then trail bike knobbies and then some kind of hybrid. All versions were 3D-printed in TPU for flexibility, but none of them could reliably grip the soft and slippery terrain.
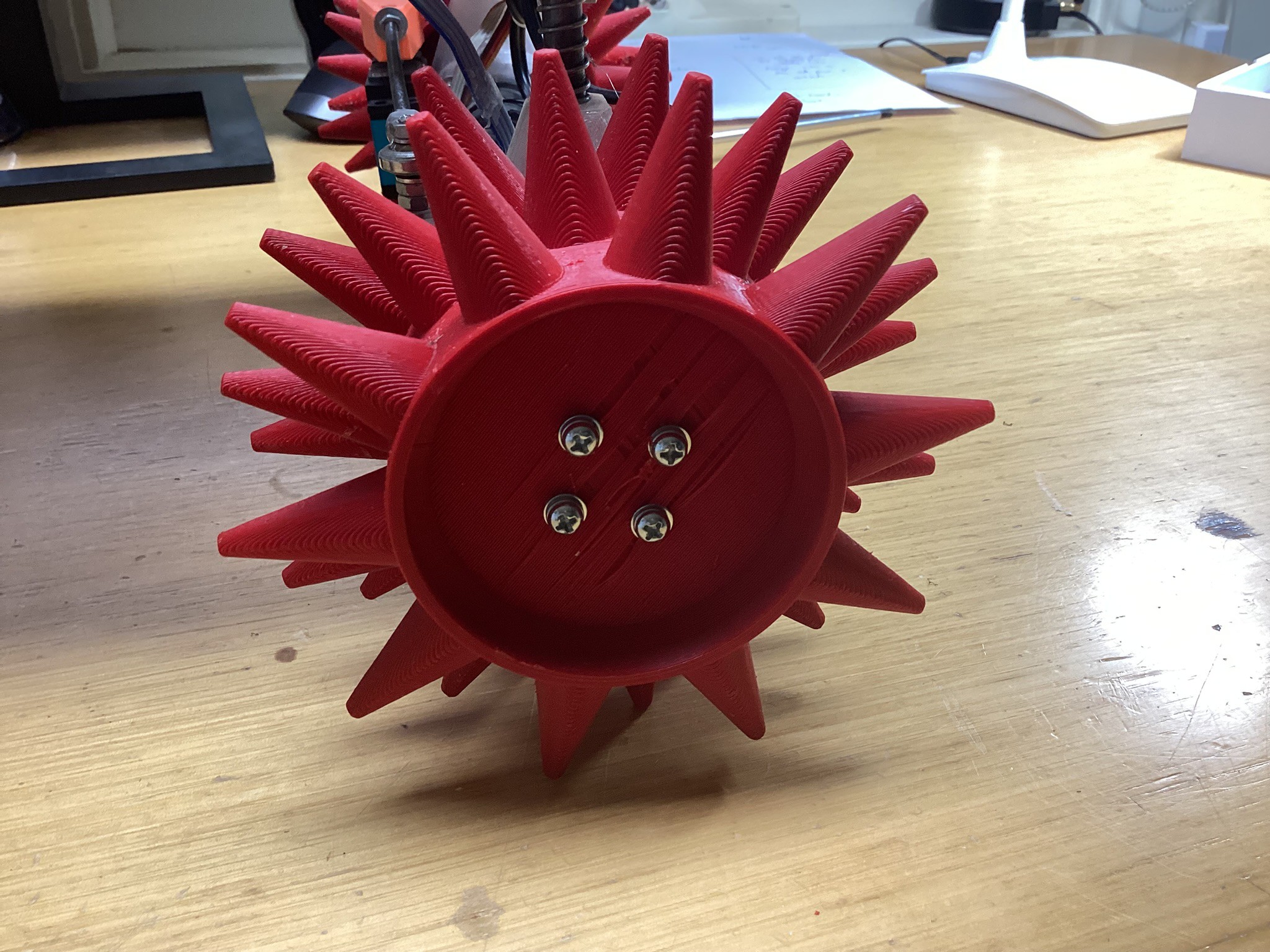
I’ve never designed tyres before, so I took inspiration from tractor treads, then trail bike knobbies and then some kind of hybrid. All versions were 3D-printed in TPU for flexibility, but none of them could reliably grip the soft and slippery terrain.Eventually running shoes with spikes inspired me. My latest attempt swapped TPU for PLA and used spike-like lugs. These actually worked... for a little while.

Unfortunately, the PLA hub, secured with a set screw on the motor shaft flat, failed under load. The keyway distorted and then melted/softened and then the wheels fell off!
To solve this, I found a proper metal hub adapter from the GoBilda range. These provide a much stronger interface between motor and wheel and allow easy, secure mounting going forward.
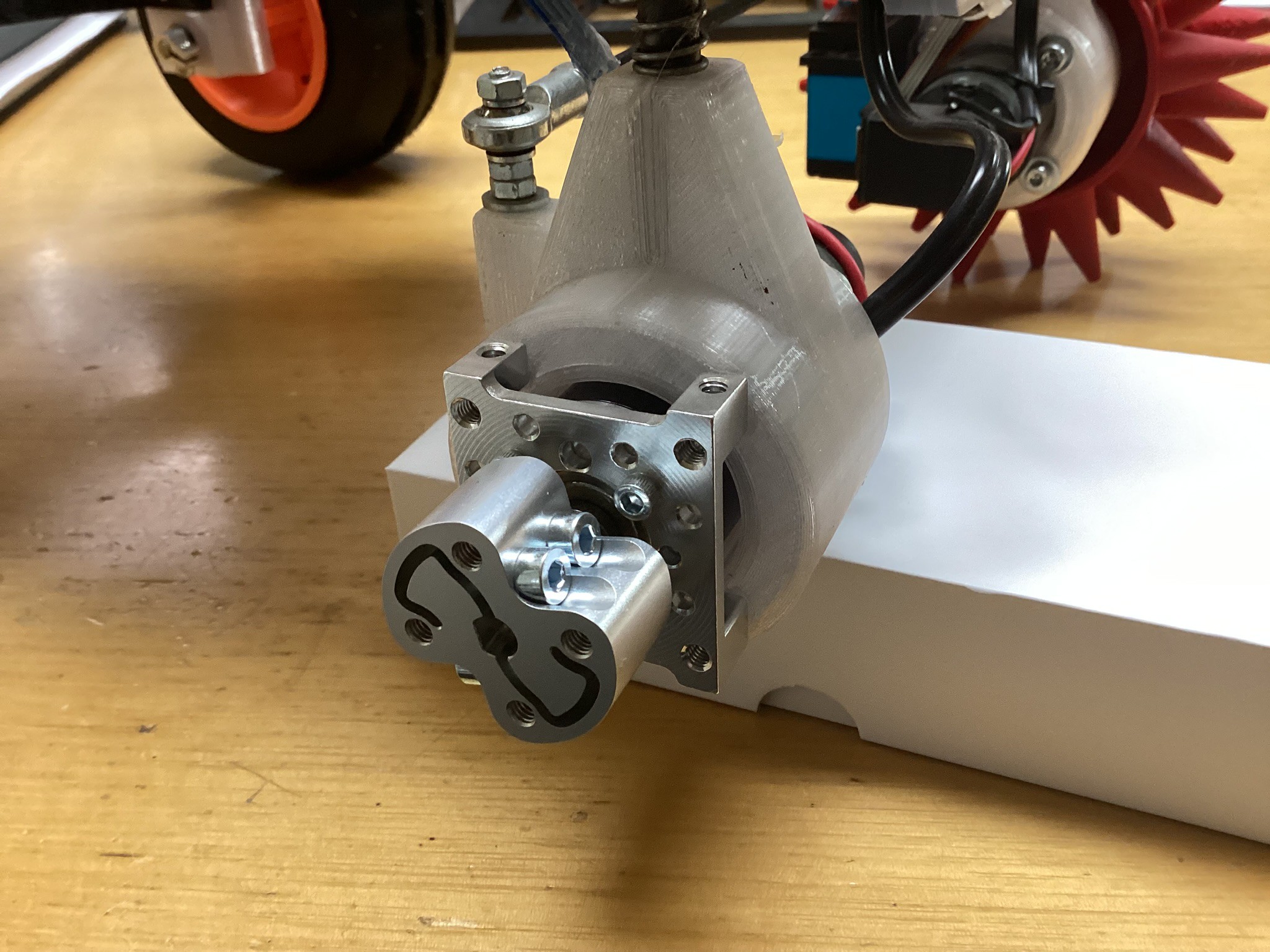

Now, just have to wait until the rain stops for further testing.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.