 AdityaPrakash23
AdityaPrakash23
Going into the last few weeks before the competition, after finishing my CAD design for my current version of Skeliwedge, I started by printing multiple samples of the chassis and testing their weight and strength. These tests showed that due to my electronics and more so the lack of preparation on that side, the weight allowance for physical parts was very limited. My current chassis and wedge parts were way overweight the 150g limit.
Furthermore my idea for adding metal springs, although being a unique feature, was illegal according to the rules of the Robot Royal Plant class. The rules being a bit ambiguous came out of left field, causing me to look for other ways to implement spring shock absorption. This led to exploration of following options
1. Cat toy springs(they were a bit too big)
2. 3D printed compression springs(difficult and not too great to print with limited materials allowed)
3. Anealling plastic wedges to make them more durable and inherently shock absorbing
4. Clay/Bluetack (difficult to implement and tricky to service)
5. 2 axis compression springs (quick to design and print)
Due to the time crunch and ease of print, I went with my last option.
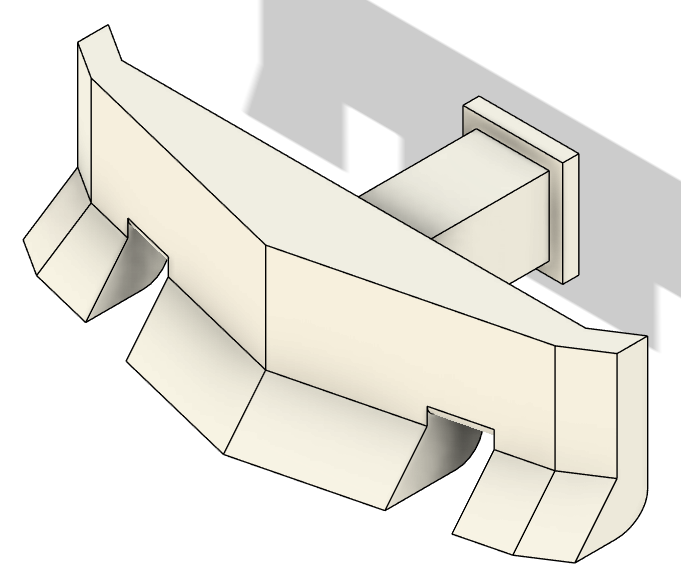
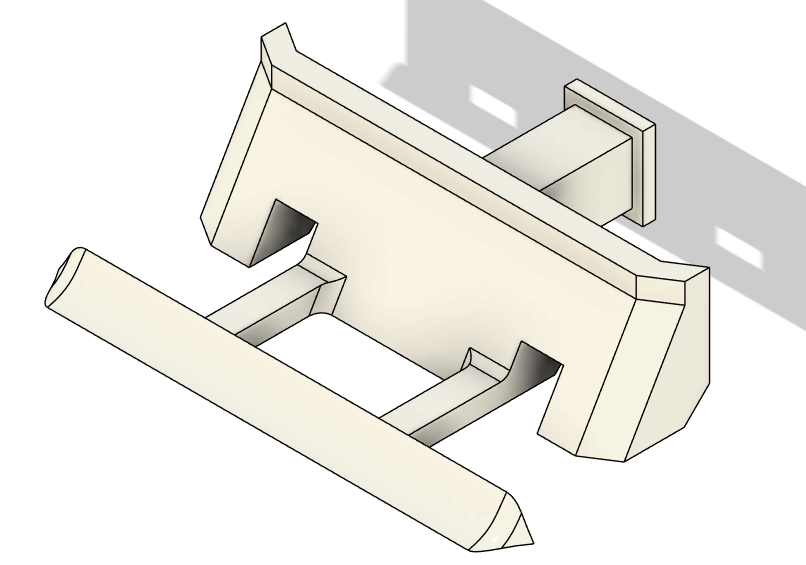
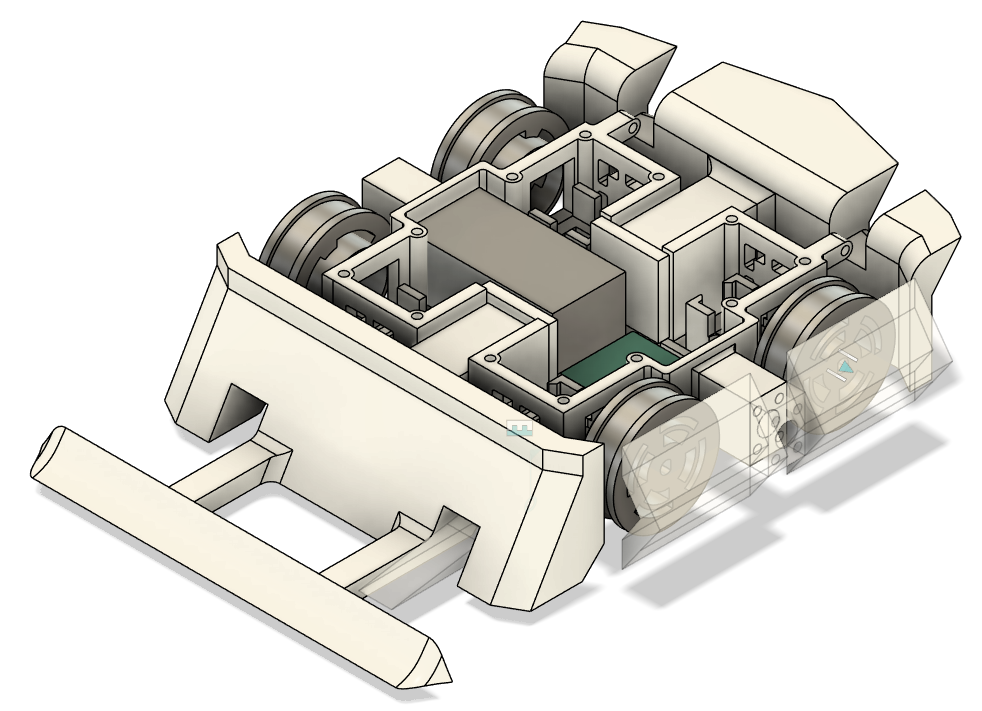
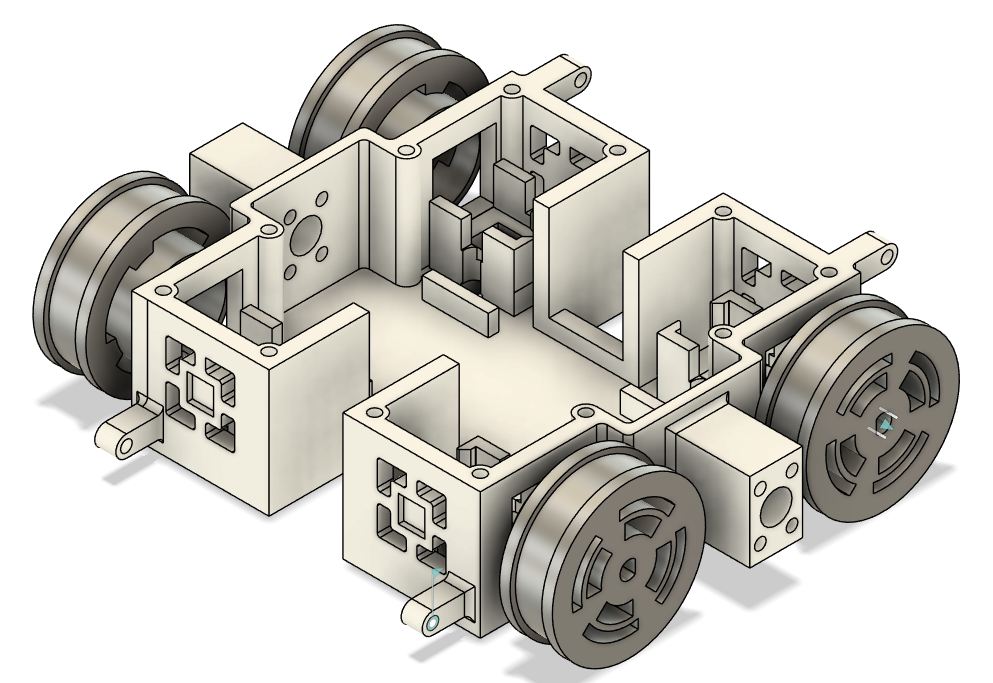
Also due to the weight issue, I ended up redoing my CAD design for the chassis and its accompanying
parts in a single late-night sitting, except for the wheels.
I did got these printed and the new chassis is promising with its smaller size and easier implementation of the side armor. With the competition approaching, I will need to quickly assemble and test things out.



Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.