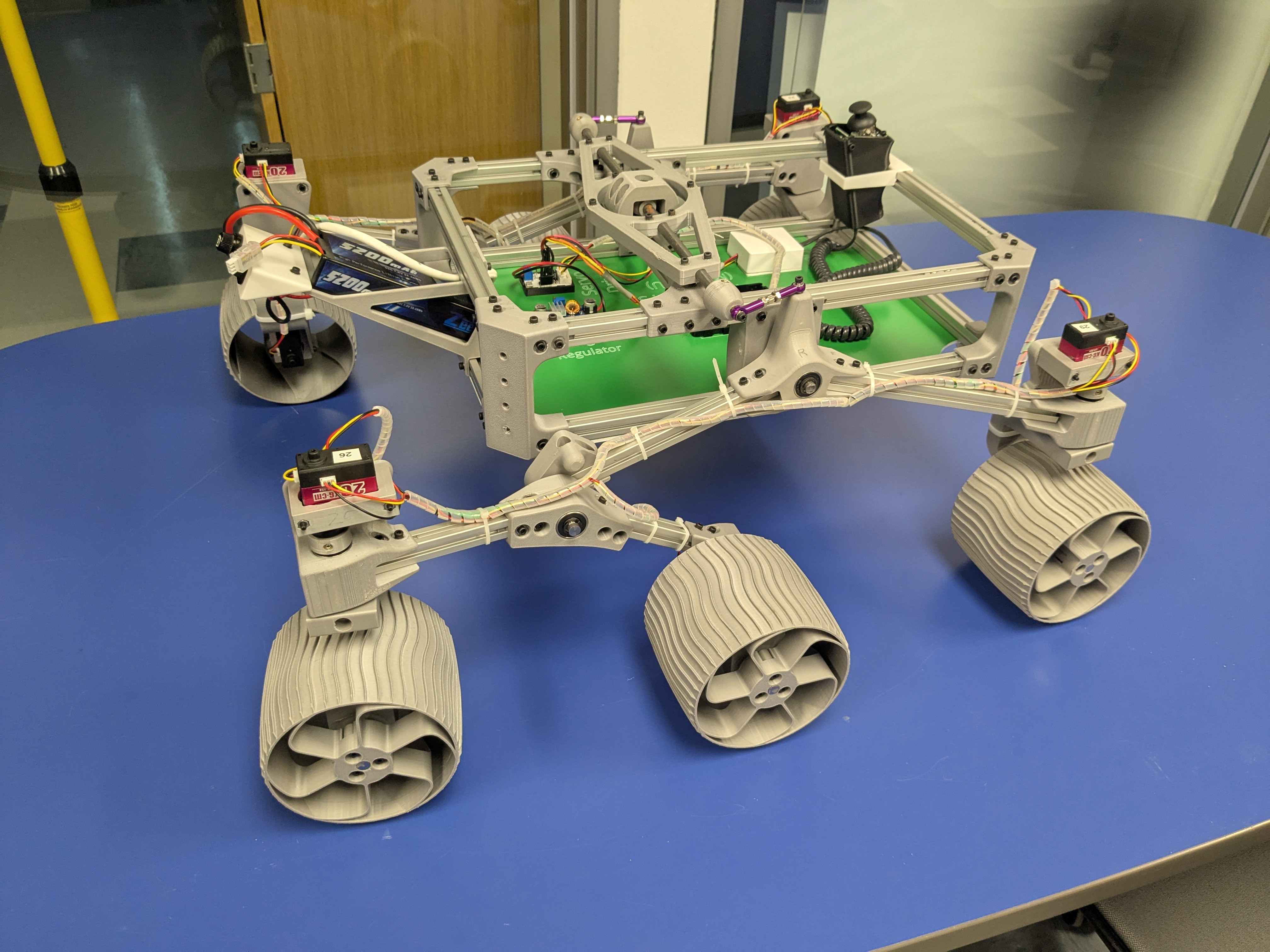
I've got the hardware and servos done. I'm currently documenting the small changes that I made on, here on Hackaday and also on github. I've implemented the basic rover with the Arduino-nano based Joystick controller.
Next up: adding the pi-based controller and ROS2, so that I can drive this thing around within my preferred ecosystem.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.