So piping my kinect data to ROS turned out to be somewhat confusing. I'm using Ubuntu 24.04 and ROS2 Jazzy.
I saw lots of folks trying to do this, and got a bit frustrated. Finally, I found a jazzy branch of the kinect_ros2 drivers (be sure to use this fork, the somewhat more canonical repo here doesn't have a jazzy branch. Following the instructions, there, I downloaded, built, and installed libfreenect, then the ros2 drivers.
Amazingly, at this point it just worked!
ros2 launch kinect_ros2 showimage.launch.py
ros2 launch kinect_ros2 pointcloud.launch.py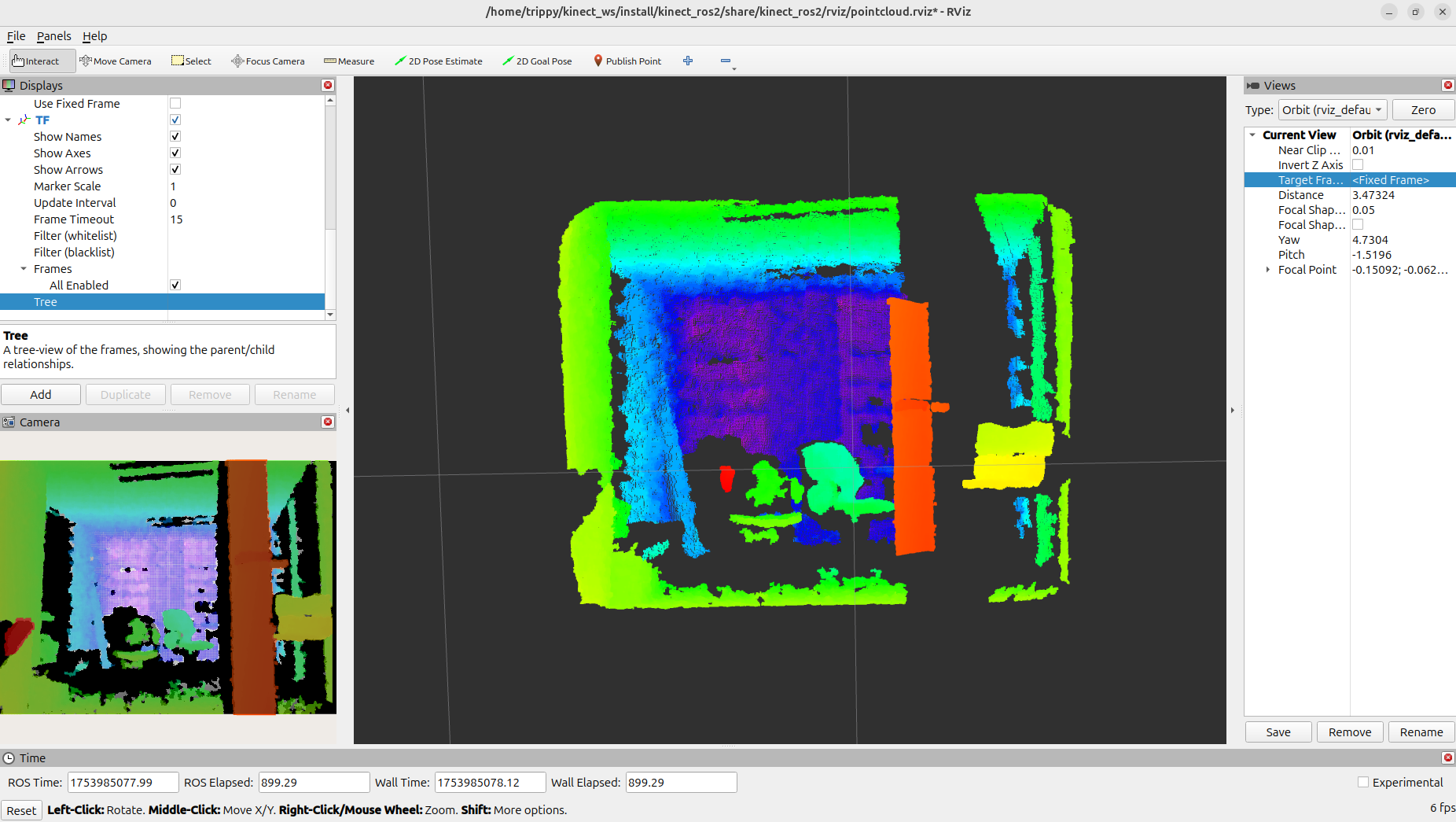
In this point cloud, you can see the chair, the door frame, and the walls/ceiling of my small lab pretty well. Next up will be to download and test out the SAWPPY driving code at https://github.com/mgonzs13/ros2_rover
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.