So the next part of my project was to "download and test out the SAWPPY driving code at https://github.com/mgonzs13/ros2_rover".
I was excited to find that you can install ubuntu on raspberry pis now, so I put Ubuntu 24.04 and ROS2 Jazzy on my Pi5. The rover_bringup, rover_sgs, rover_motor_controller, and rover_service work with only a few changes (which reminds me I need to submit a PR for those....).
So I have a working robot_description, and I can move all the joints around.
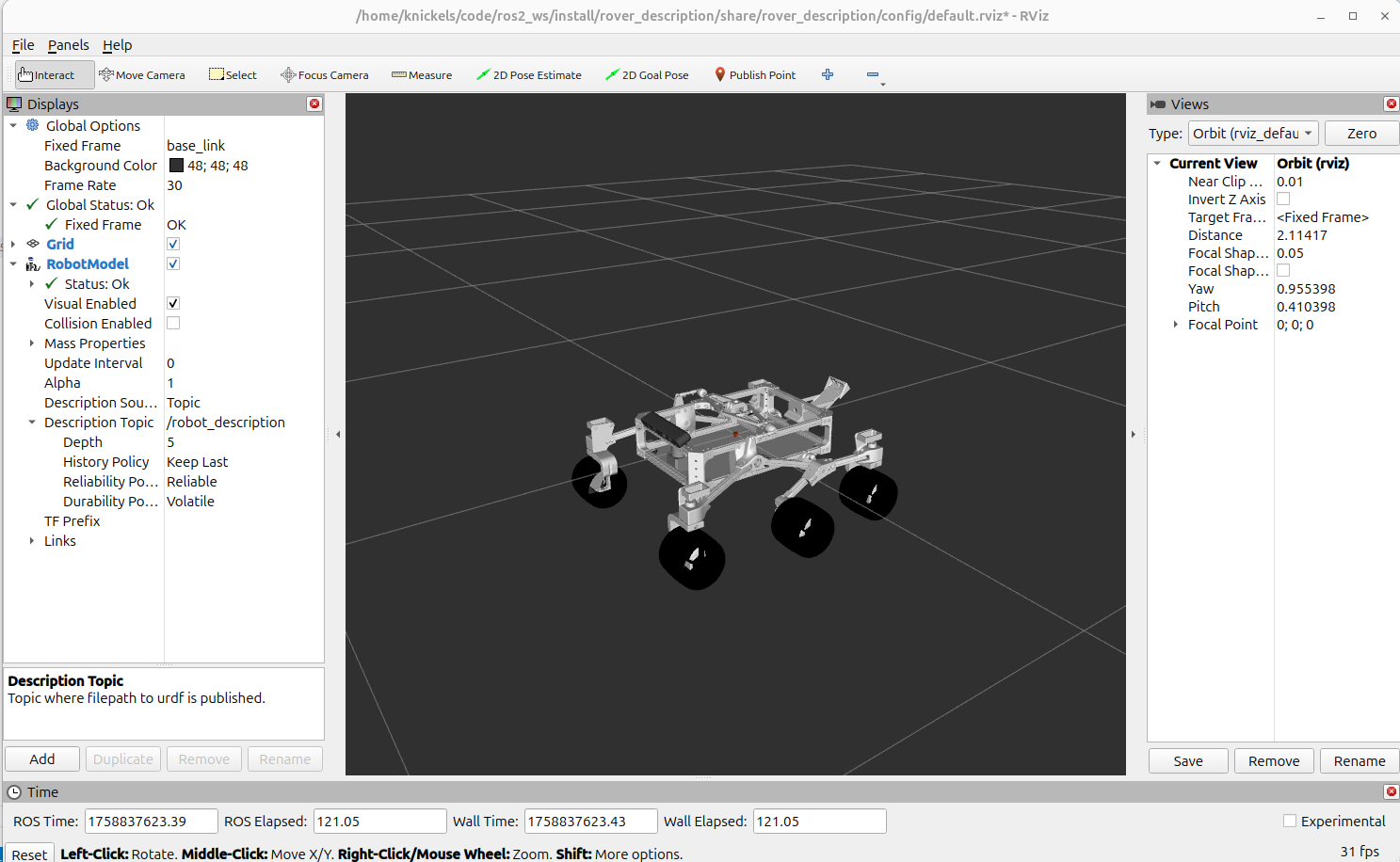
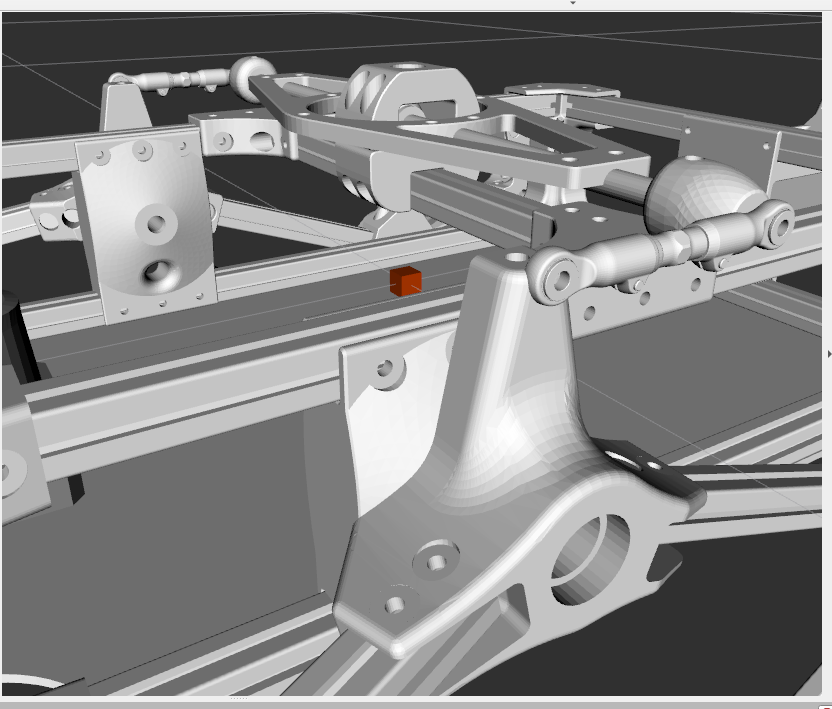
You may notice if you zoom in on the turnbuckle that it's not attached. Turns out that closed kinematic loops give Gazebo heartburn, so I left that link out. For the simulation, I'll fix all the passive joints (the rocker joints and the bogie joints).
So now I can teleop my rover from another computer using a gamepad. Not too different from the on-board joystick using an arduino, to the casual observer. But since it's ROS, that means that as soon as I can get the kinect stream ingested as a costmap, I'll have autonomous navigation!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.