 anfroholic
anfroholicSo stay tuned!! Please give a like or a follow for updates.
This project has gotten massive but here's a small overview:
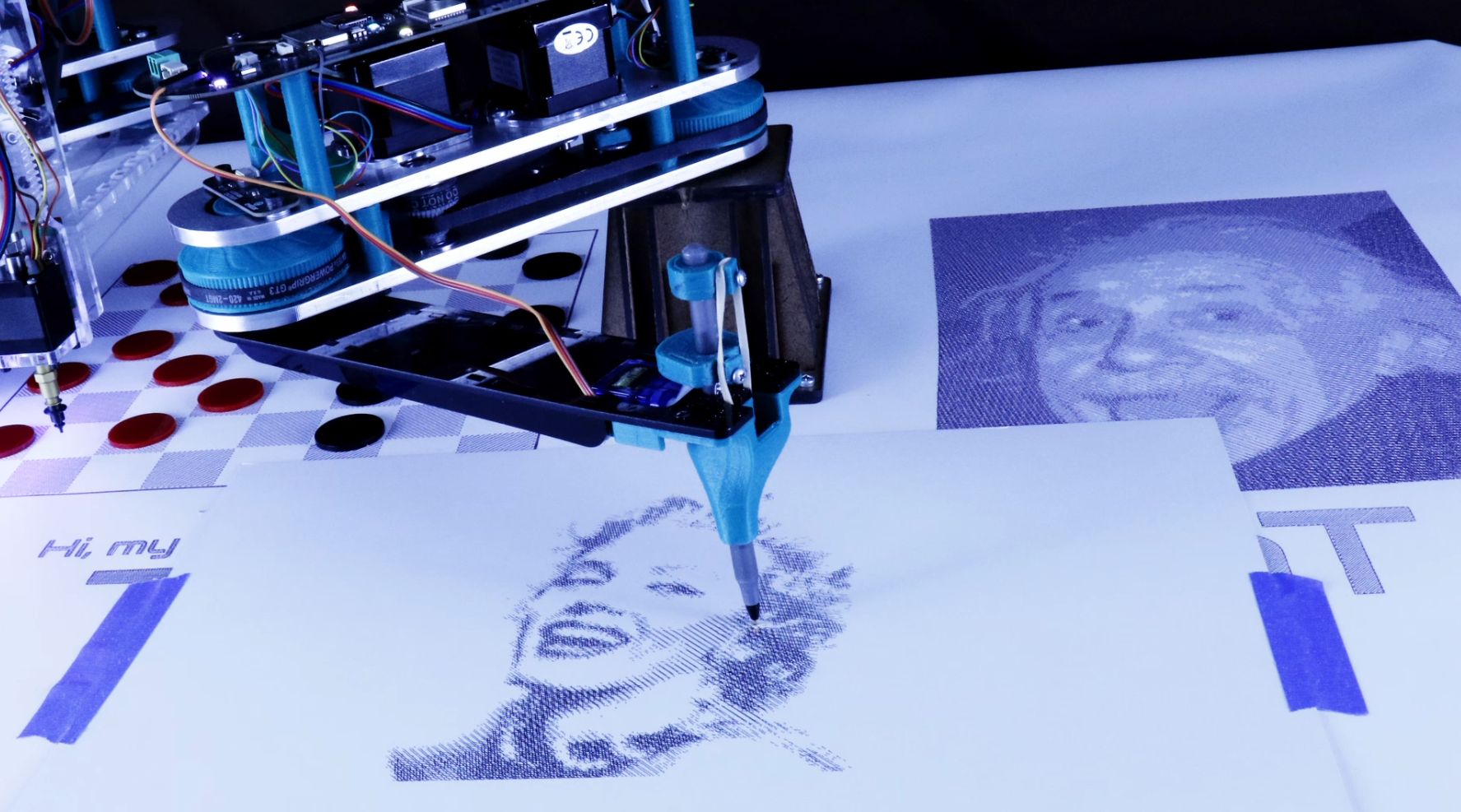
Introducing our newest robotic arm: Tobor
Tobor is a fully featured robotic system that can fit on your desktop and is capable of helping you automate your workflow. Tobor (robot spelled backwards), was built to be the most versatile open-source robotics system, which can be customized endlessly to meet your automation needs. Easily combine robotic arms, motion platforms, sensors, actuators, and more to create your unique machine.
See more on our Crowd Supply Page
We're working hard to get all the source files in order. The best way to get them the soonest would be to follow our campaign
Use Tobor to Draw
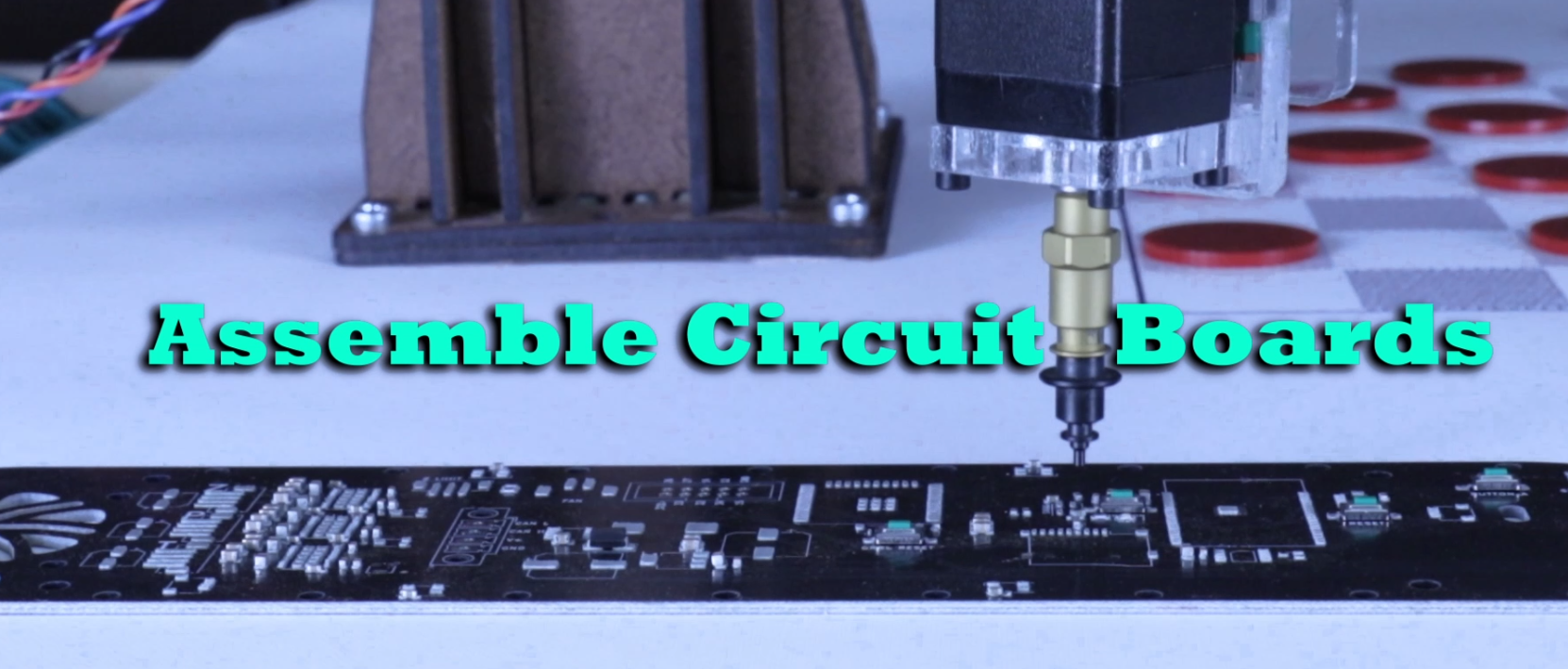
Use Tobor to Assemble Circuit Boards

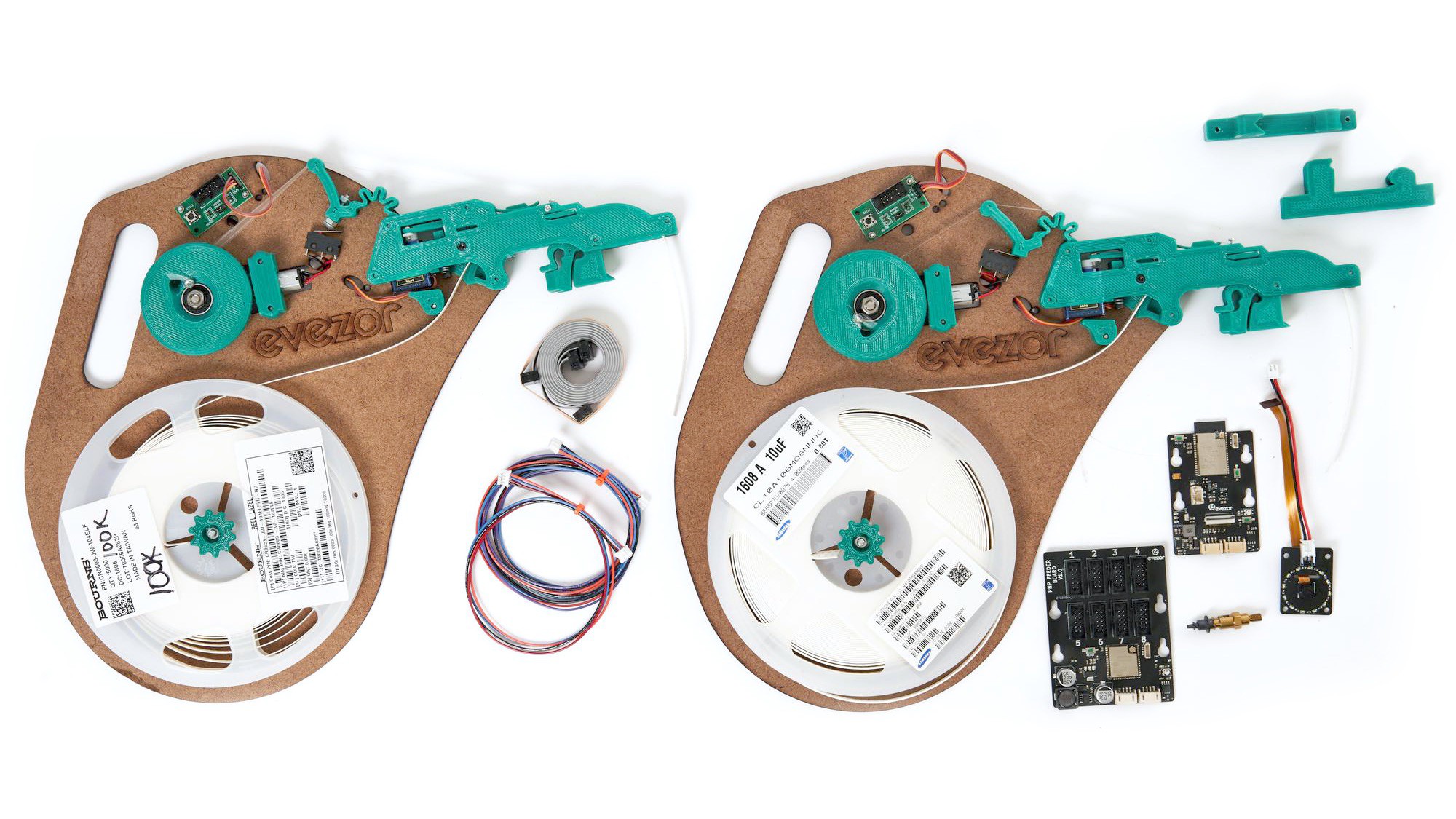
Edge Boards

Edge boards are a suite of discrete open source electronics boards networked through an open protocol developed by us and programmed using an easy to use drag and drop interface, also created by us. Network mediums currently are focused primarily on CAN bus, MQTT, and some APIs hosted by Evezor, covering the base cases of ease of use, low latency and communications over the internet.
Floe IDE
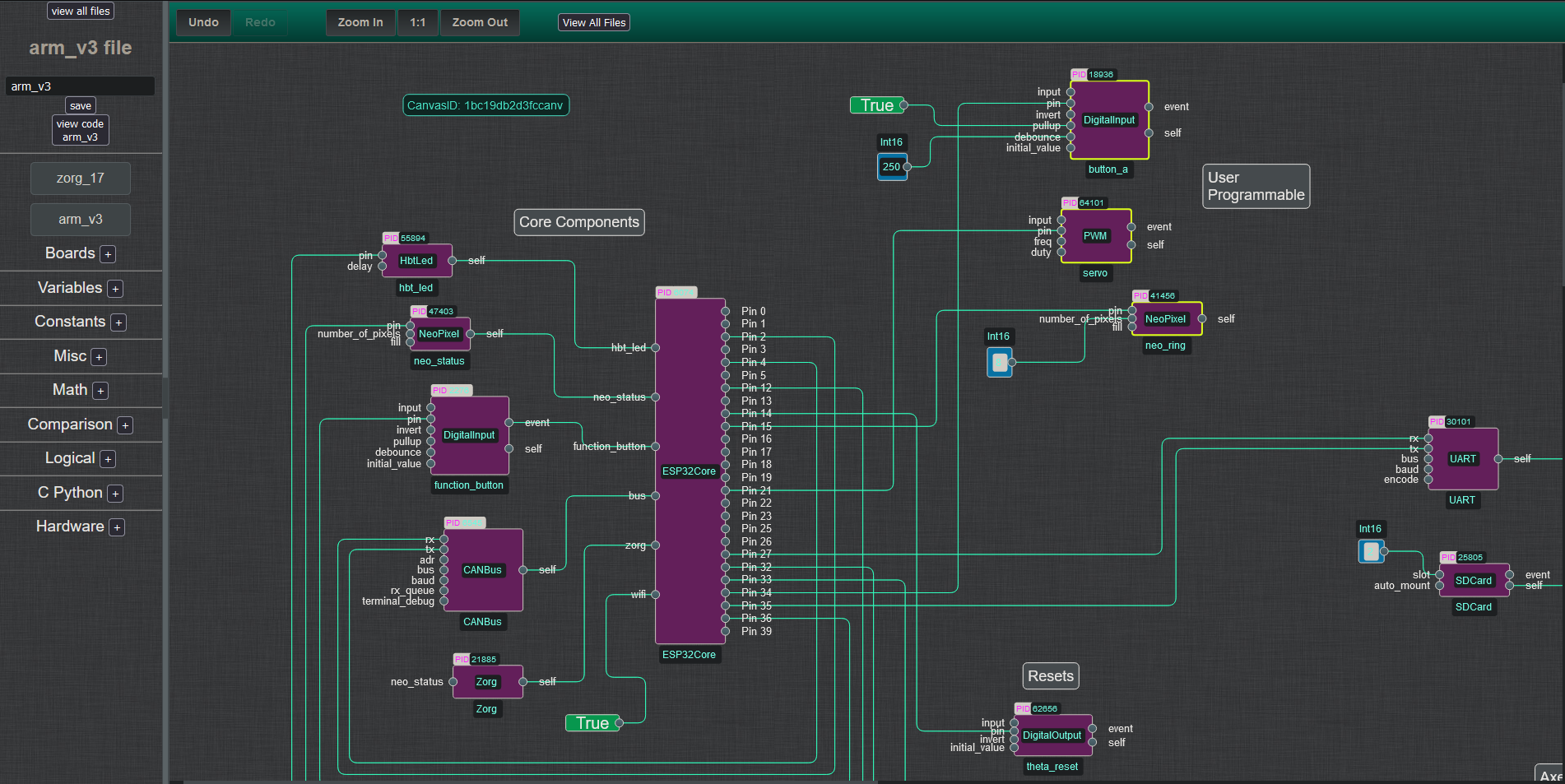
FLOE IDE is a drag and drop flow based programming language used to network robots over whatever but they are connected to. For quite a while now in the software world we've had tools like docker and kubernetes. Now it's time for the hardware world to have the same thing.
You can find a demo here: https://floe.evezor.com
Short Demo of Boards and IDE
One of my favorite videos
Santa wants to get some of our arms under some Christmas trees

And love for Hackaday
https://i.imgur.com/iYR05tR.mp4
I've got a ton coming so follow here and subscribe to us on Crowd Supply
https://www.crowdsupply.com/evezor-inc/tobor-robotics-and-automation-platform









 Neven Boyanov
Neven Boyanov
 Sander van de Bor
Sander van de Bor
 Casual Cyborg
Casual Cyborg
 Rishi
Rishi
Hi, how much payload can it hold? I am building a robotic hand and I am selecting a low cost arm for it.