 anfroholic
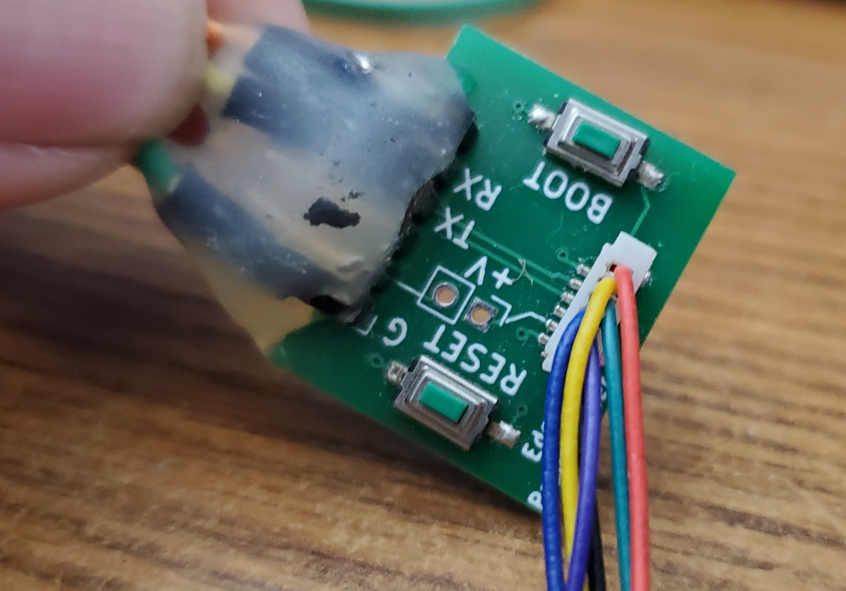
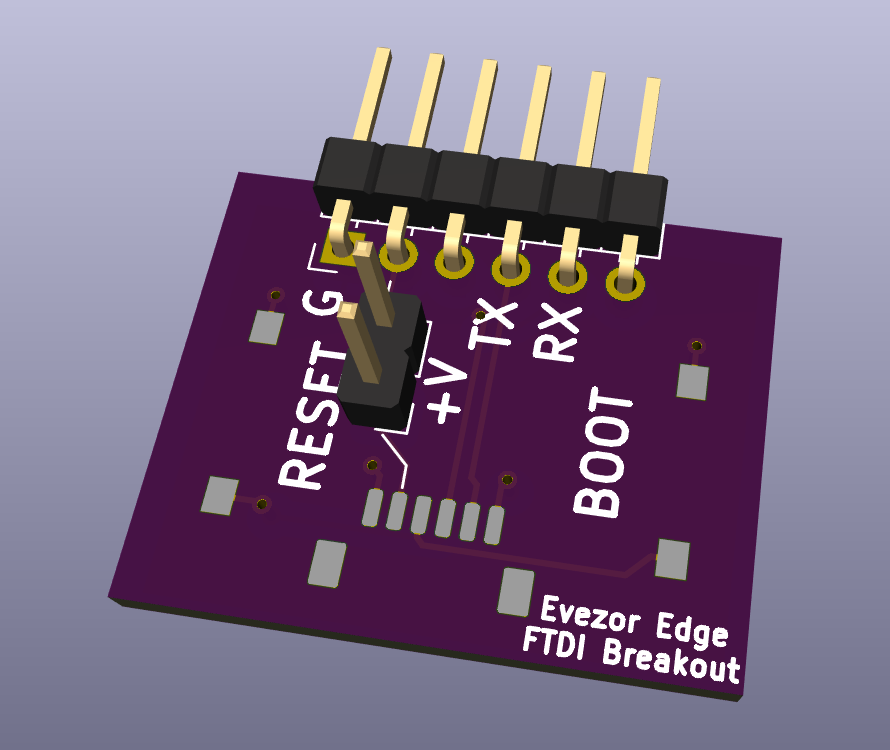
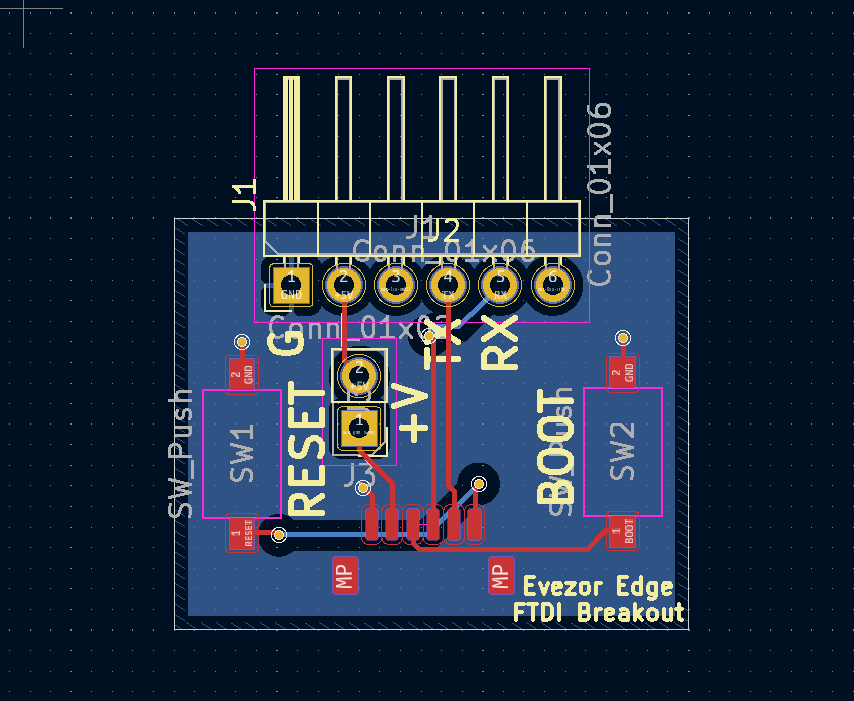
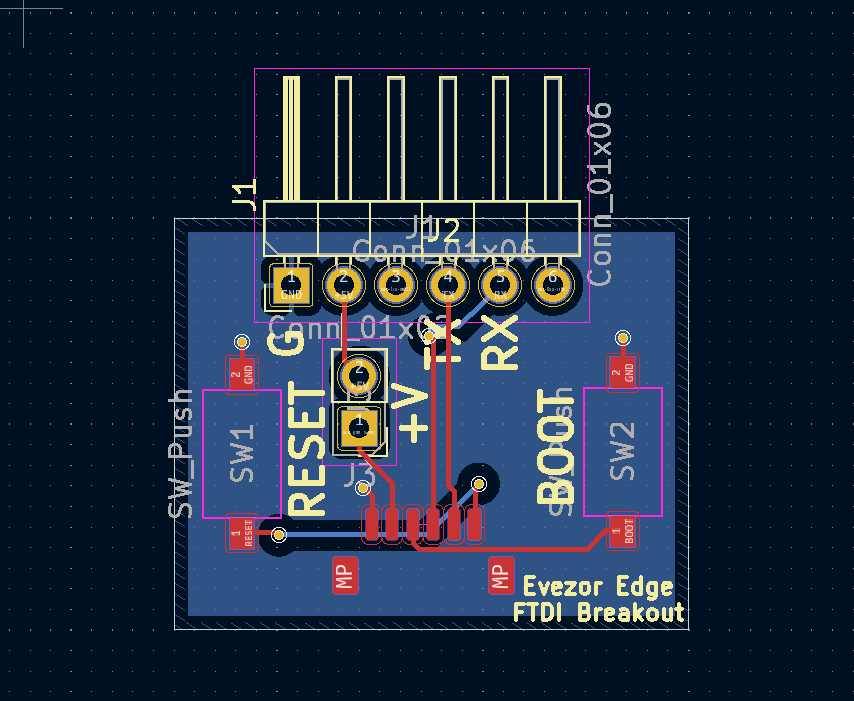
anfroholicThis board uses the standard 6-pin JST-SH connector and breaks out the rx and tx pins and adds 2 bottons for reset and boot pins.
Source files can be found here: https://github.com/evezor/evezor_edgeboard_ftdi_breakout
A project log for Evezor Robotics and Automation Platform
A Networked set Robotic Arms, Motion platforms, sensors and more. Easily programmed with a drag and drop interface.
This board uses the standard 6-pin JST-SH connector and breaks out the rx and tx pins and adds 2 bottons for reset and boot pins.
Source files can be found here: https://github.com/evezor/evezor_edgeboard_ftdi_breakout
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.