 anfroholic
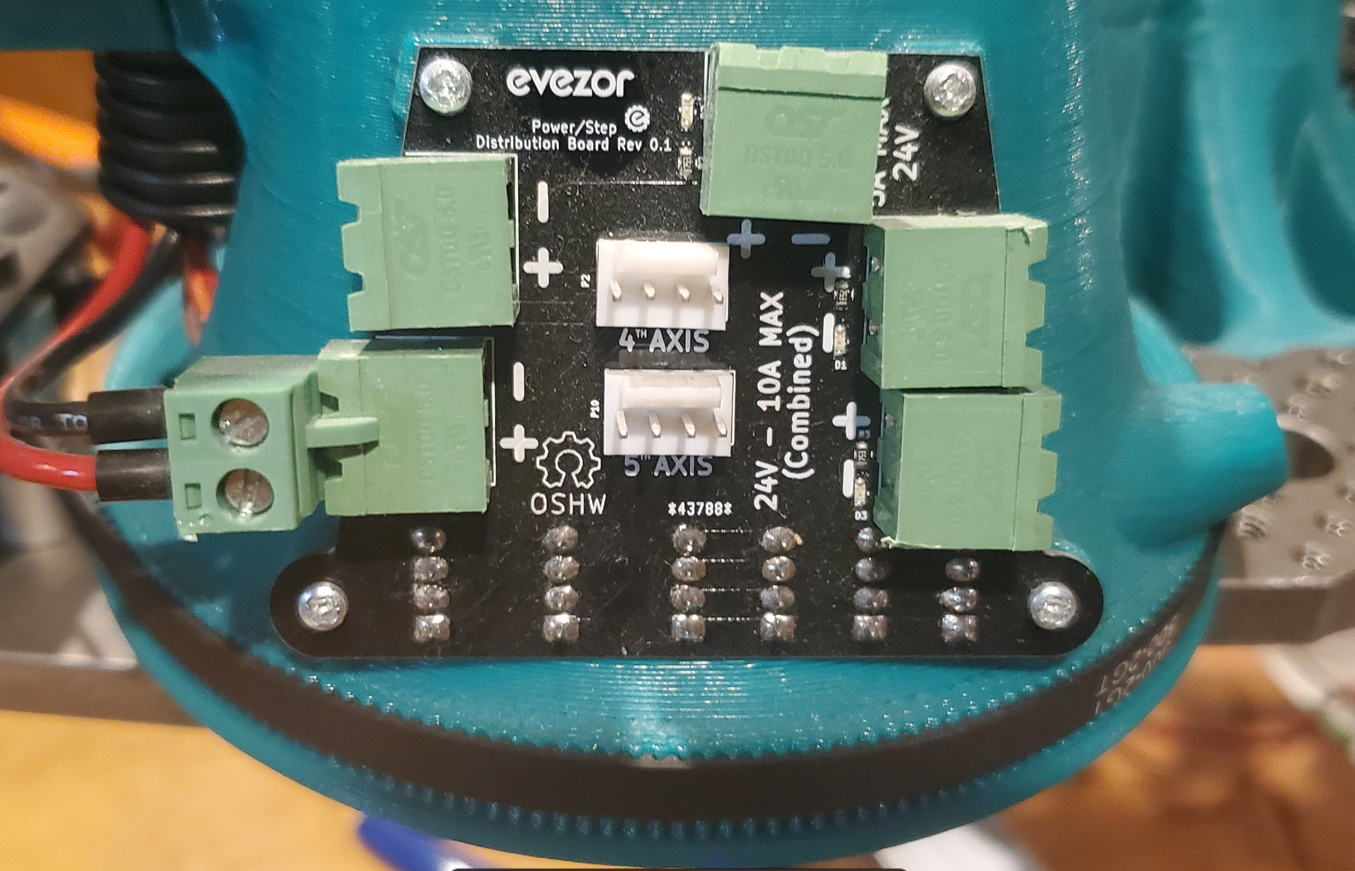
anfroholicThis board was intended to sit at the elbow of the robotic arm and serve as a power distribution point and a place to plug in extra stepper motors when extra axis are wanted.
Source files can be found here: https://github.com/evezor/evezor_arm_v1_sleeve_powerstep_board
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.