 Vittorio Lumare
Vittorio LumareThe finger joints have currently a slight tendency to move laterally when performing pinch grasp on certain objects.
This modification shall provide more stability, ensuring no lateral movement.
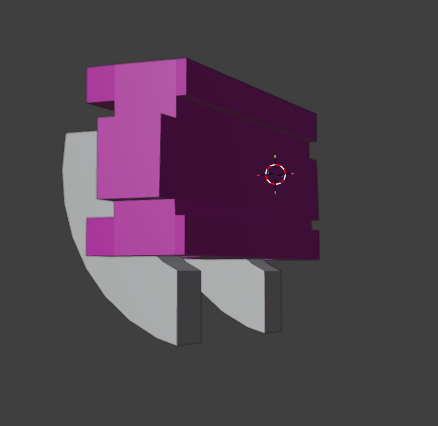
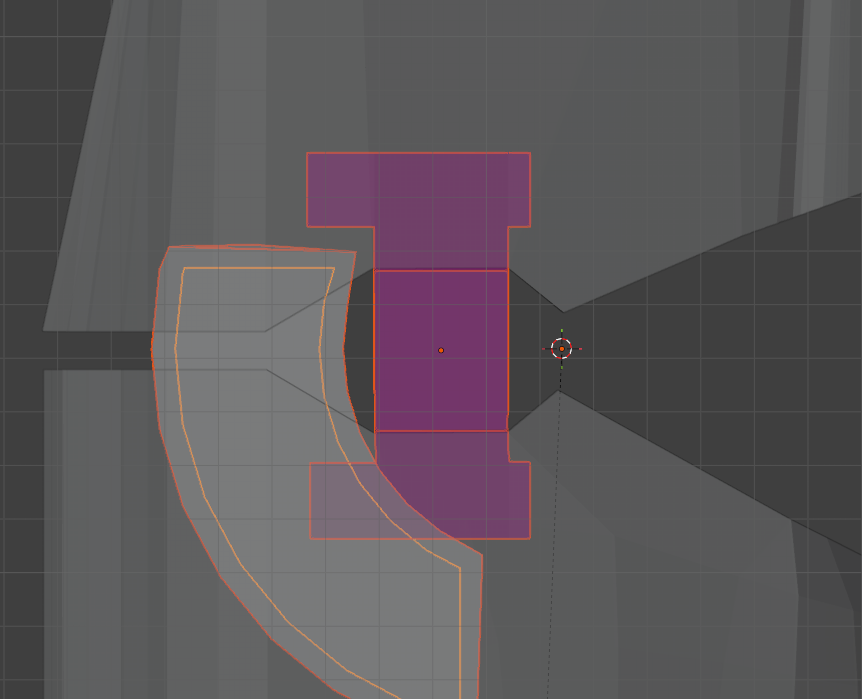
It consist of 2 rigid guides that allow only circular movement of the joint, around it's virtual axis.
Virtual since there is no axis in this tpu flexible joint. Also, the virtual axis (the center of rotation) moves slightly during the closure, so the guides cavity has been increased by 0.3mm on each side to ensure smooth movement, using the Solidify modifier in Blender.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.