Tiny update regarding how the handles will look for the cubes.
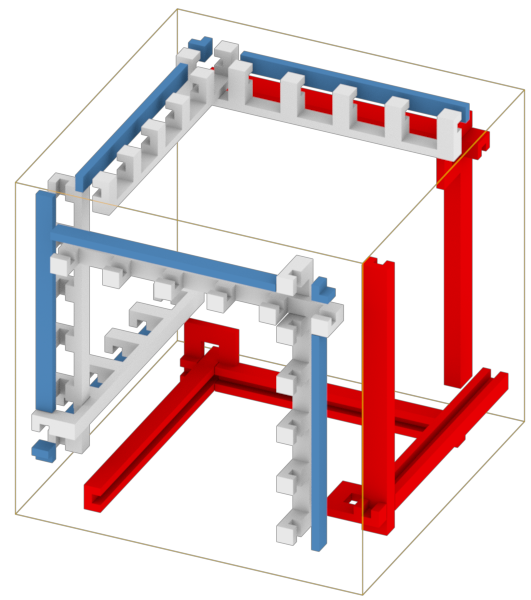
The bullet list refers to the two first images below.
- The white objects can only move 2 mm in the direction toward the blue object
- The red objects can only move 4 mm in the direction out from the cube
- When the red handle of one cube is extended 4 mm out, then it will be inside of another cube, that other cube can then hold onto it with its white handle.
- The electrical signals (Vdd, Gnd, signal out, signal in) will go through the handles.
- The handles allow for only one dimensional movement, if all handles on a side are used then two cubes are locked.
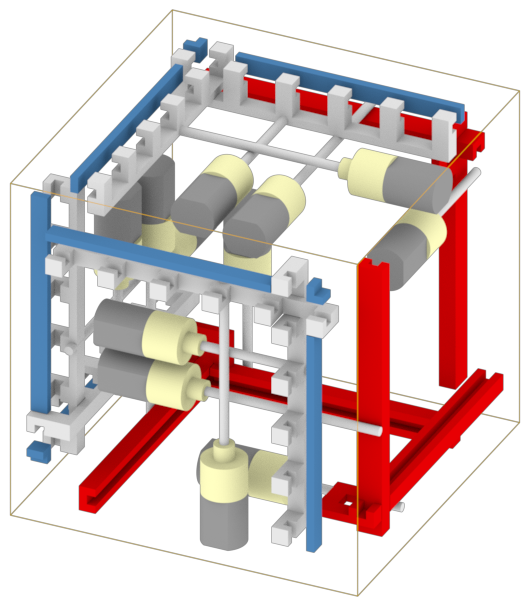
See the image below
On every side there are two handles, either it's two female handles (white) or two male handles (red). Every handle needs to move a couple of mm, so (6 sides) x (2 handles per side) = 12 actuators are needed. I tried solving it with voice coils, but it turns out they eat amperes like crazy, so that is out of the question. So I'll use the next best thing, small DC-motors with planetary gears connected to threaded rods (M2).
That looks like this:
In my opinion it is not acceptable because each of those motors costs roughly 1$, and that's 12$ per cube just for the handles, plus the weight is unnecessary. No, I need to solve it in a similar way that cars shifts gears works. But in this case motor shifting or whatever you want to call it. One motor shifts the "state" of another motor which acts on only one handle. For this geneva gears are excellent since they make continues motion to discrete-ish motion, which is perfect for "states".
So I'm going to use 3 major states and put the motor-multiplexer in a corner of the cube, then I will do the same in the opposite corner of the cube which will take care of the other 3 sides. It works very good in the simulation for 2 dimensions, and it looks like this:
![Geneva gear working in two dimensions gif [4.2MiB]](https://cdn.hackaday.io/images/original/9111881491250565433.gif)
But I don't want it to be flat, like a plane, I want it to be in the corner of the cube like this:
![Geneva gear working in three dimensionsgif [4.9MiB]](https://cdn.hackaday.io/images/original/7465101491250558406.gif)
If you have some sharp eyes you can see that it shouldn't work at all because the red object has the wrong shape, so that's what I'm working on right now. The same goes for the white object as well, I think it should have 4 cuts, not 3.
Oh well, soon it's time for 3D-printing and verifying it. And then the fun part comes, which is to make it replace the 12 motors and also cover the moving part of the cube. Fun fun fun.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.