 Omer Inbar
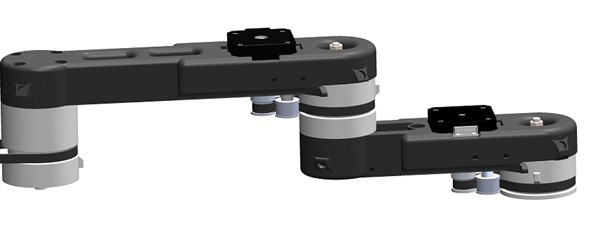
Omer InbarThe arm itself consists of two links moving on parallel planes. The second link is shorter so it can move entirely beneath the first but other then that they are identical.
On the first end, they have a rigid interface to the previous joint coupler, on the second end is the rotational interface to the next coupler, and in the middle, I’ve integrated the motor mount, belt tensioner, and cable routing features.
In my original concept, I designed each link as two end pieces connected by a 2020 T-slot profile. The idea was to enable modular arm lengths by simply switching profiles, allowing for identical end-pieces for both links and saving print time.
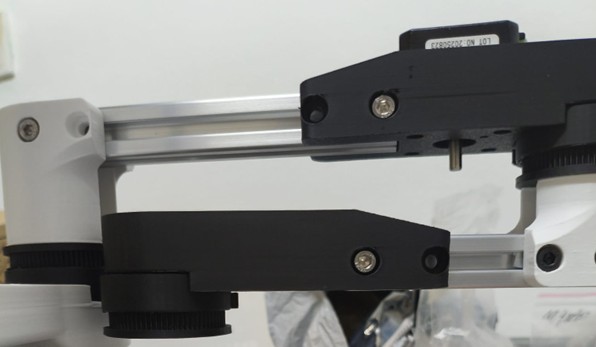
Eventually, I realized that the links are so packed with features that the profile turned out to be less than 50% of the total length. Switching to a single printed link resulted in a design that is much cleaner, simpler, and eliminates the profiles, nuts, and bolts from the BOM. Additionally, since I intend to make covers for the arm, I actually can't freely change the link length without redesigning the covers.
To simplify the design and from lack of space I went with a stationary belt tensioning idler. I mount it so it "interferes" with the belt's path and then push the pulley into place with a little force. It rotates on a 3x8x4 bearing and has an M3 bolt as a shaft connected to nuts embedded inside the motor's cavity. I had to design and print a custom idler so I could iterate on its diameter until I got it to fit. Its not the easiest assembly but I really like how it runs now.

I put a lot of work into properly running the wires along the arm. I wanted it to look neat, but more importantly, I tried to eliminate EMI as much as possible. The cables will run in two dedicated channels that keep the signal harness and power harness as separate as possible and on the opposite side from the motor and i put little zip tie slots to enable nice management.
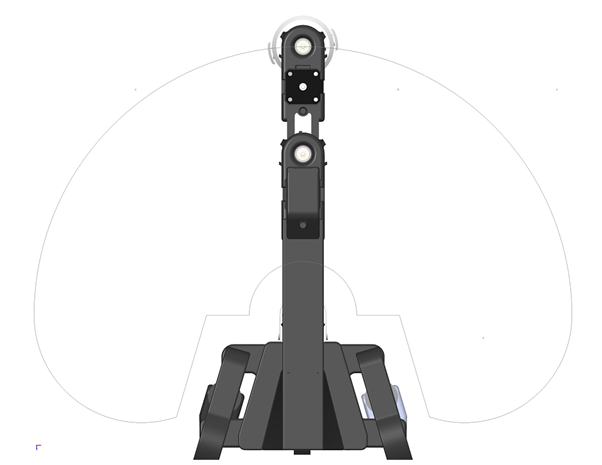
The current link lengths are 195mm and 130mm for a total reach of 325mm. I believe this will change over time. Hopefully, as I improve the stiffness in the tower and first joint, I will be able to reach a little further without suffering from too much flex.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.