 Omer Inbar
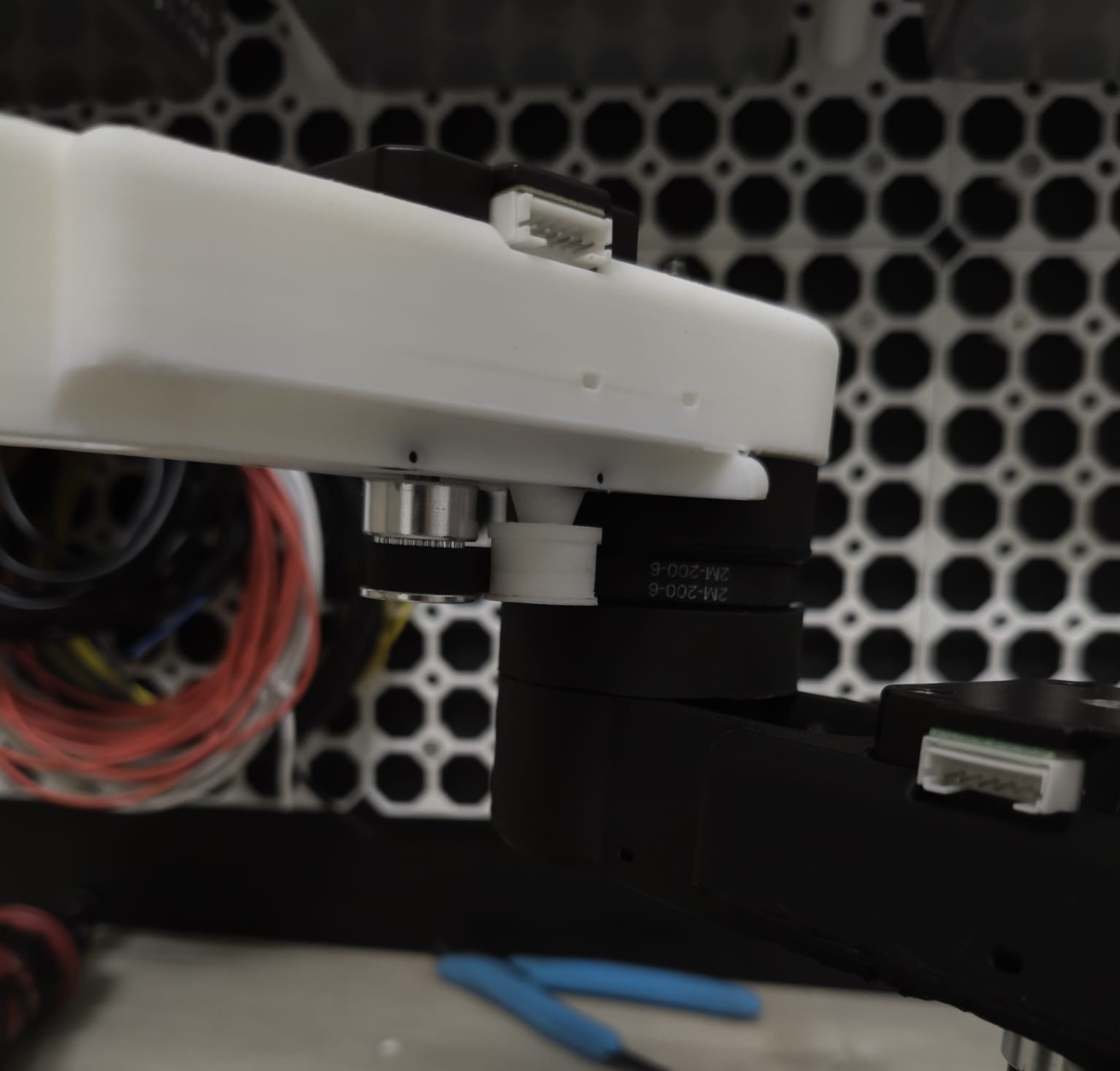
Omer InbarOne of the key building blocks of this robot is the planar chain of rotational joints (shoulder → elbow → wrist). I wanted these joints to be rigid, smooth, low-backlash, and easy to assemble.
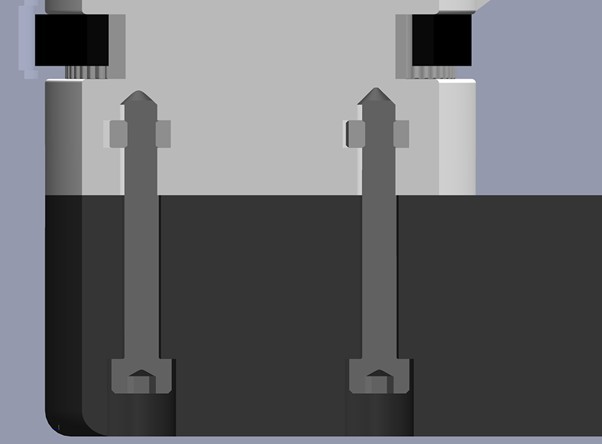
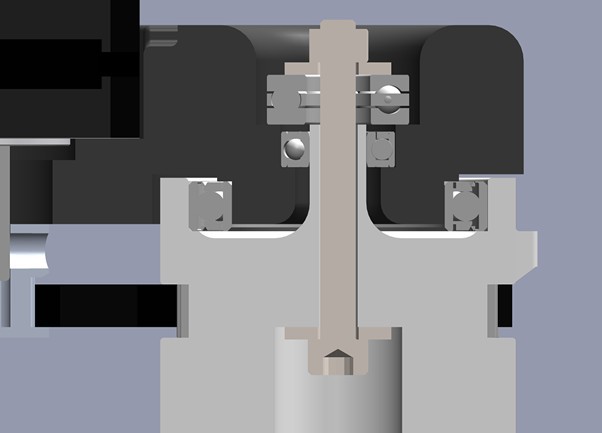
Each joint uses a printed coupler that connects two links and also doubles as a GT2 timing pulley. The trick that made this work was combining a thrust bearing with a large radial bearing so the coupler can clamp tightly to the first link without adding friction. I added another smaller bearing along the axis for extra moment resistance and embedded M4 nuts into the print to bolt the second link firmly.
I am very happy with the result, when printed at 100% infill its incredibly tough and feels very nice when rotated.
I also really love the concept of embedded nuts in the important joints of the structure, it has a really nice high-end feel to it. if anybody has experience with embedding other metal components in prints i would really love to hear it.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.