 Omer Inbar
Omer InbarA Z-compensation (or Z-compliance) module is a common component in industrial robotic arms. It consists of a base plate bolted to the robot and a floating plate that moves relative to the base against a spring, triggering a sensor at a known position. It is typically used in pick-and-place applications to pre-detect collisions or to pick objects targeted by top-view vision where the precise height is unknown.
This is a feature I rarely see implemented in non-industrial products, yet I believe it is incredibly useful for a low-cost system.
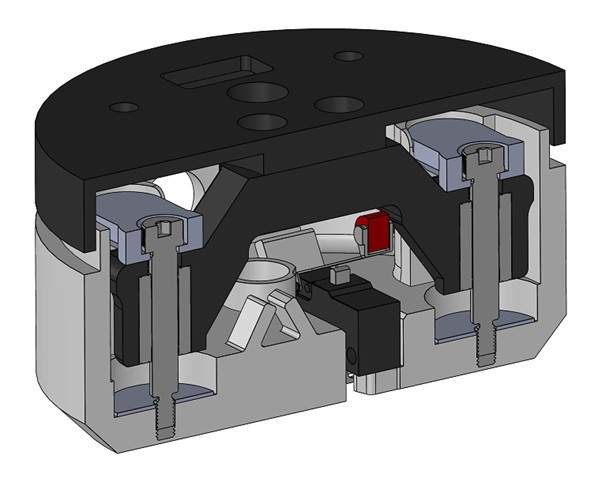

Although it slightly feels like an overkill, I guided the floating plate on two 4mm linear bearings along shoulder screws bolted to the base, with springs between them. For the sensor, I mounted a simple limit switch on the base that triggers slightly before the end of the stroke. The module sits between the fourth joint and the Tool Changer.
A trigger of the sensor will signal different things in different sequences and scenarios.
In a tool change sequence it signals contact with the tool and after OK from the verification pin it will initiate a servo grip.
If triggered in an ordinary motion it will signal a collision and stop the robot.
I initially designed a button on the Tool changer module to enable manual tool connection/disconnection but ended up deciding to dictate that when the robot is stationary, the Z-comp module will be used as the tool changer's button. I think it will be a really cool user experience.
Something i will love to try at some point is simplifying the design by going for a compliant mechanism that basically acts both as the guide and as the spring. I am pretty sure I can design a 2 part printed module that will achieve the same functionality but i suspect the challenge will be keeping it rigid and immune to unwanted rotations.
If there are any experienced compliant mechanism designers out there i would love to hear your advice.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.