 aeropic
aeropichardware :
========
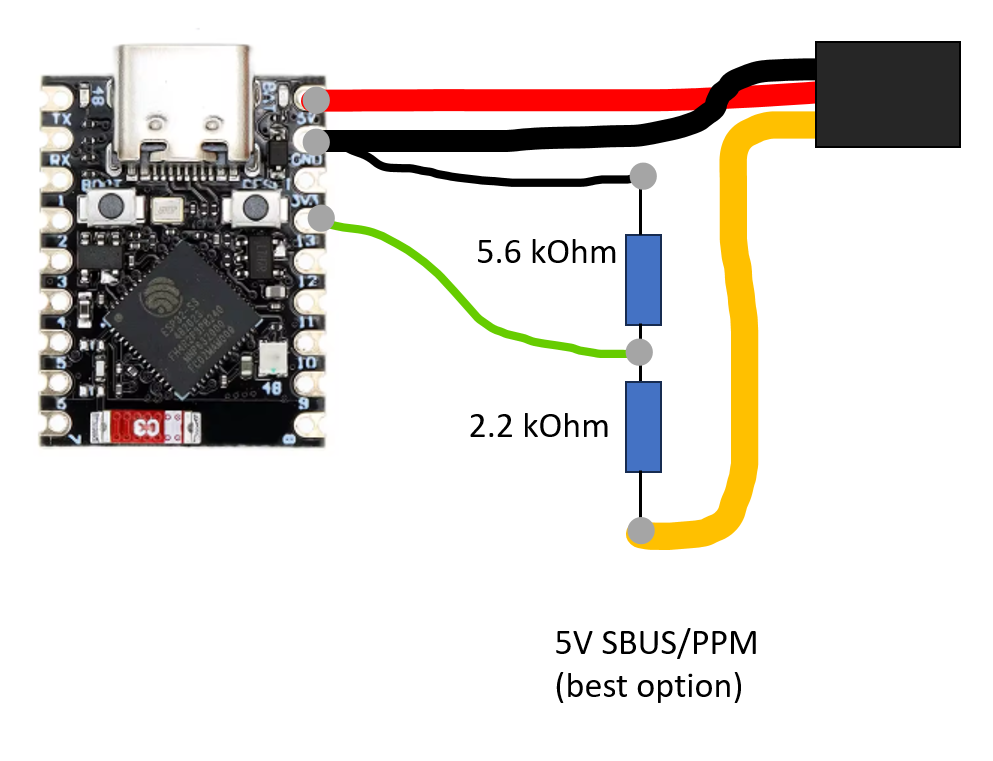
solder a servo wire red to +5V, black to GND, white (SBUS signal) to GPIO 13 (right column just under 5V, GND, 3.3V)
(in case your RX has a 5V logic, just add a resistor bridge in serial to the signal pin)
configuration
=============
add "https://espressif.github.io/arduino-esp32/package_esp32_index.json" in preferences/additionnal boards URL
in board manager type ESP32 and select ESP32 expressif
in "tools/board" select "ESP32S3 DEV module"
USB Mode : "Hardware CDC and JTAG"
USB CDC On Boot : "Enabled"
in "tools manage libraries" include "USB", "USBHID", "sbus from Bolder flight", "ESP32_PPM" and "ADAFruit Neopixel"
compile and upload this code
press the reset button or switch OFF/ON the board
user manual
===========
the LED shows the status of communication:
- flashing blue/purple/yellow : searching protocol : no signal is received, either the RX is not connected or the radio is OFF
- solid cyan : the PPM signal is received and valid
- solid purple : SBUS signal is received and valid
- solid red : the TX signal is lost, failsafe is active
to test the joystick on W10 or W11, just type "joy.cpl" in the search area. The device ESP32_DEV should appear,
press properties, the "test" tab is activated, move some axis
then go to parameters and calibrate the joystick (important as the SBUS range is set to +/-150%)