 Peter McCloud
Peter McCloudSolid progress is being made on the firmware, particularly for the master node that connects to the flight controller. As the firmware is being developed, it's tested periodically on an ESP32 connected to the Pixhawk 2.1 (shown below).
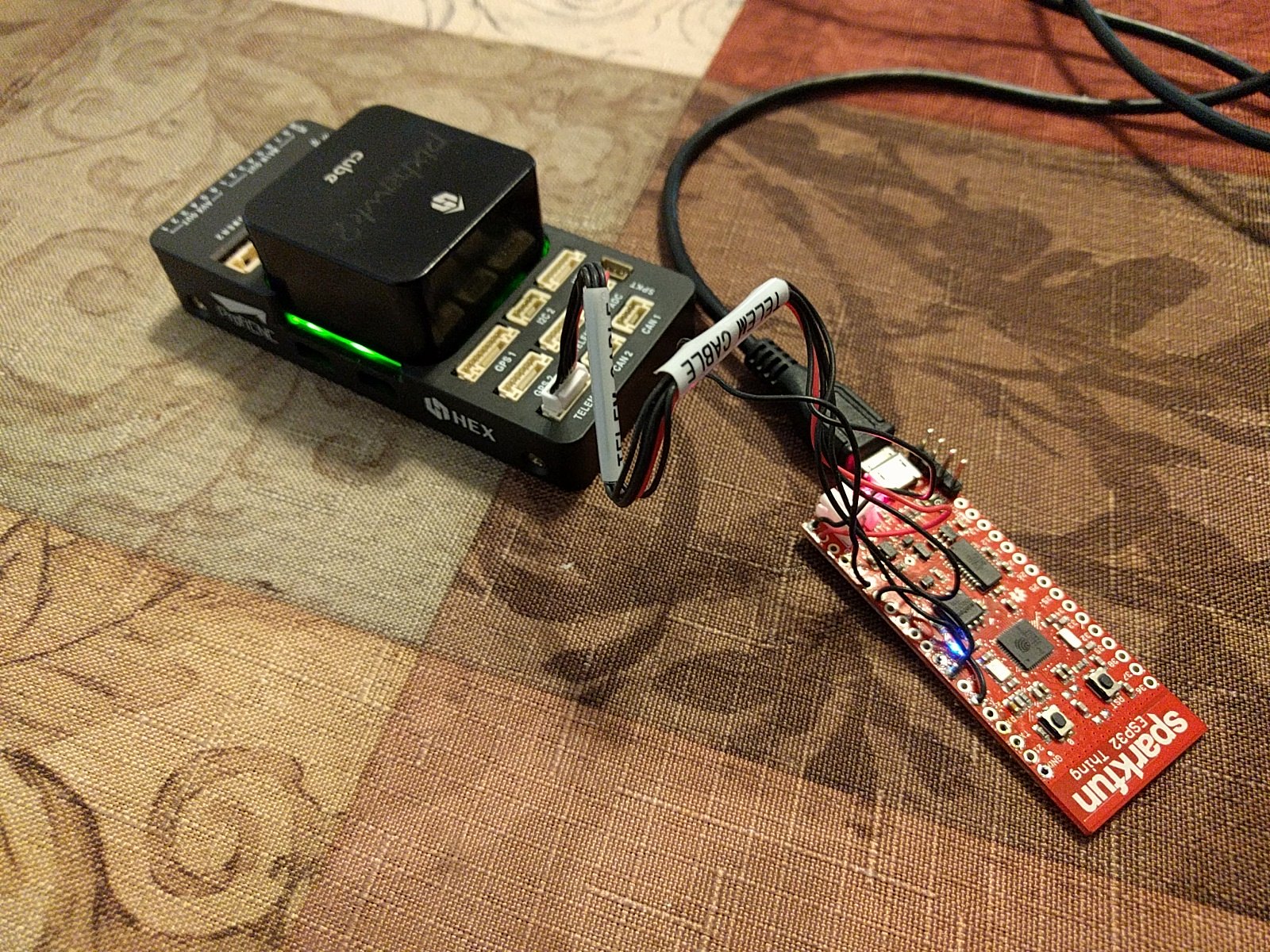 ESP32 is connected via on of the UARTS to the TELEM2 port on the Pixhawk. The Pixhawk sends out messages via the mavlink format on the TELEM2 port. The data is then parsed using the mavlink c libraries. The firmware is finally correctly parsing the mavlink messages, so the next step is the pass the relevant messages onto the other rotors.
ESP32 is connected via on of the UARTS to the TELEM2 port on the Pixhawk. The Pixhawk sends out messages via the mavlink format on the TELEM2 port. The data is then parsed using the mavlink c libraries. The firmware is finally correctly parsing the mavlink messages, so the next step is the pass the relevant messages onto the other rotors.
The ESP32 is also running a webserver via Mongoose to provide a status page. Example shown below:
EVPR MASTER NODE STATUS Time since start: 28.942919 secs Connected stations: 1 Station 0 MAC: AC:7B:A1:DE:DB:4F Connected to Flight Controller System ID: 1
Most of the major pieces for the firmware are in place, it's just a matter of tying together all the pieces now. Once it's done, then the next step will be to test a single EVPR on the vehicle and test the ability to change pitch.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.