 Ryota Kobayashi
Ryota KobayashiIt uses SteadyWin QDD motors and an ODrive motor controller.
There is an interface panel on the back, and it also has an emergency stop (E-STOP).
The hands use the open-source Amazing Hand.
The biggest feature of this robot is that its joints use differential gears.
Most of the parts are 3D printed.

The CAN bus is split into two lines, one for the left arm and one for the right arm.
The power board and the hand control board are custom-made.
One unique point is that the hands use Feetech servos, which cannot communicate over CAN.
So, a custom STM32G4 board is used in the hands as a special interface.
In other words, it imitates the ODrive protocol.
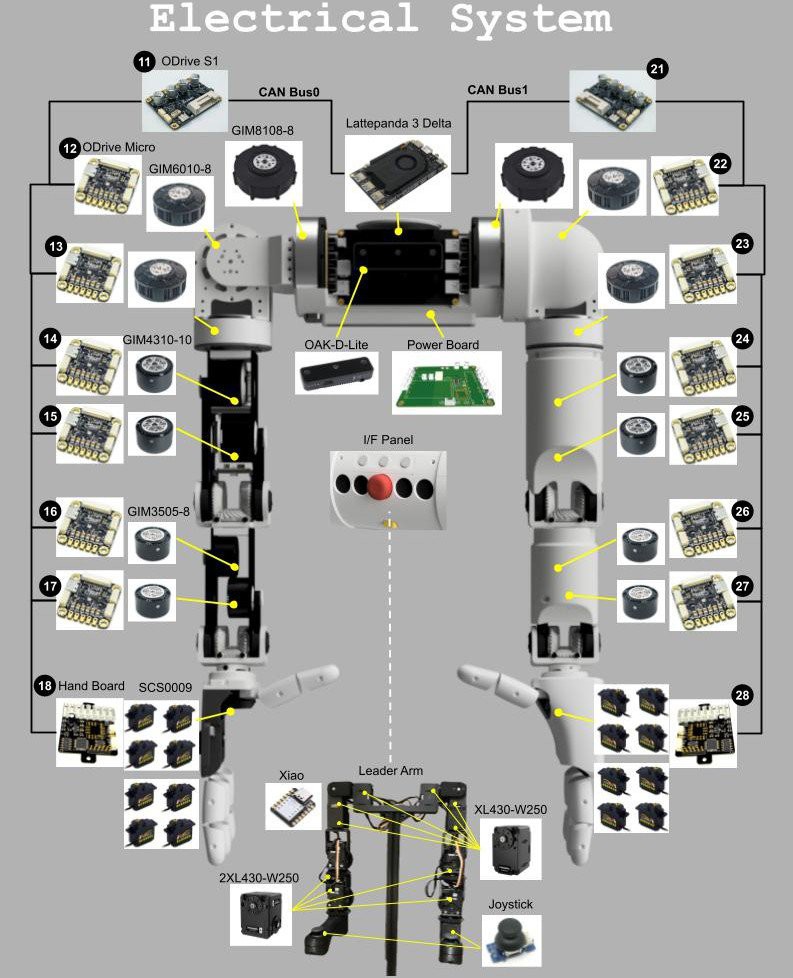 Each arm has 7 joints and moves smoothly.
Each arm has 7 joints and moves smoothly.By the way, using a video camera tripod to hold this kind of upper-body robot is a great solution.
At the moment, it can be controlled by teleoperation.
The leader device uses DYNAMIXEL motors with the same number of axes.

As the next step, I plan to improve the hands and work on imitation learning.