 Victor Lockwood
Victor LockwoodThe Base So Far
The first part I'm working on completing is the mobile base, which will be driven by 2 high-torque continuous servo motors.
V1 of the base was unfortunately flawed from the start; I mis-measured the servos and did not account for the space needed for the wires, so to make due in order to make new measurements, I needed to pry out space so it looks a little like rats got to it.


It was a starting point though, and as the saying goes "measure once print twice".
V2 turned out better, repositioning the servos and adding screw holes. This time it could be assembled.
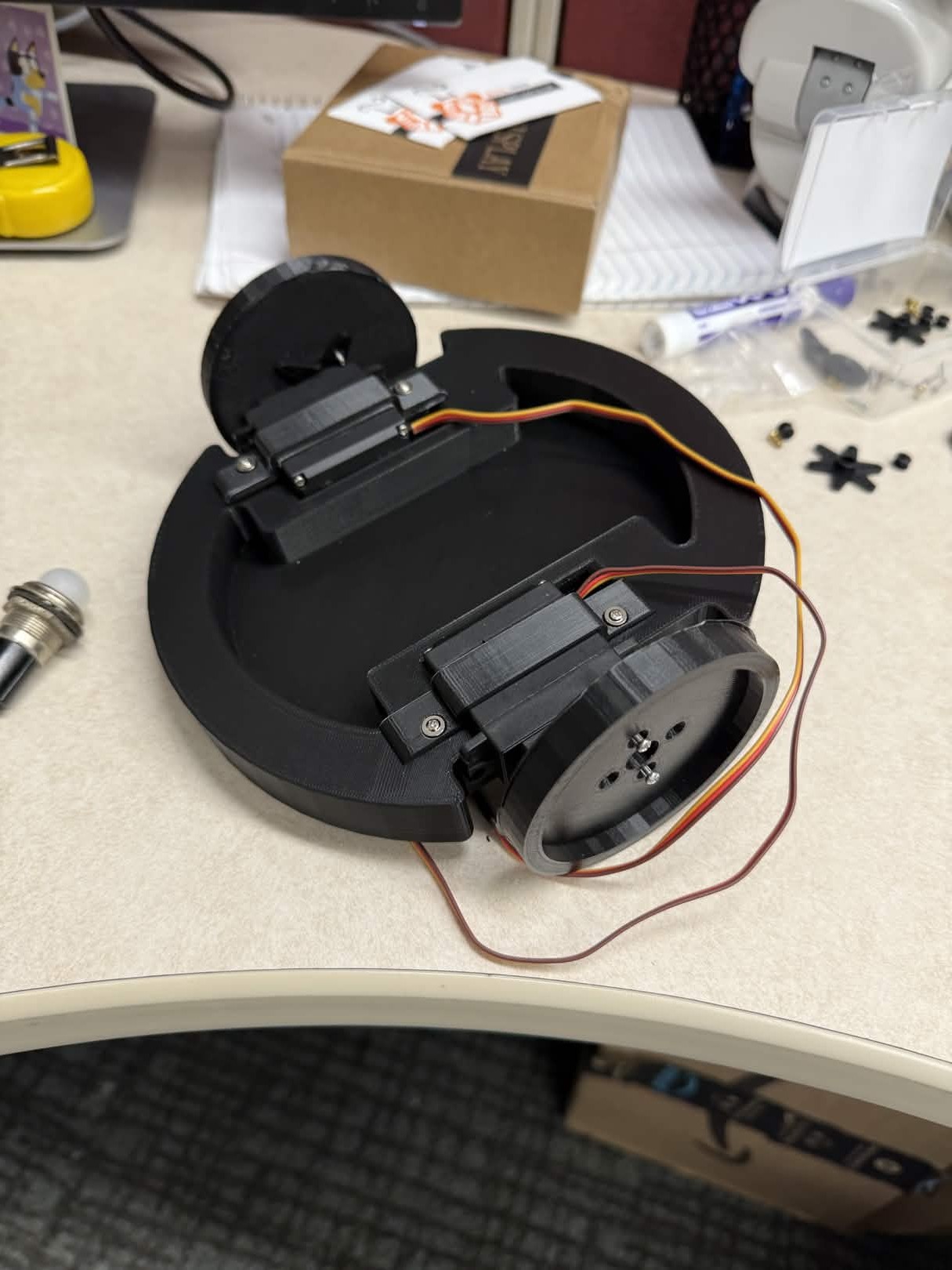

With the addition of some subpar wheels and brackets (all modeled and printed), the vague shape of a robot is forming. I have a weird little piece of scrap that will end up being a castor wheel, so V3 of the base will have a slot for the servo driver, more screw holes and a hole to secure the castor.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.