 Robotics Everyday
Robotics Everyday
Why I Built This Robot?
The goal of this project was to design a robot that can move in three dimensions while keeping the mechanical structure simple and lightweight. So this robot with design satisfies all these requirements.
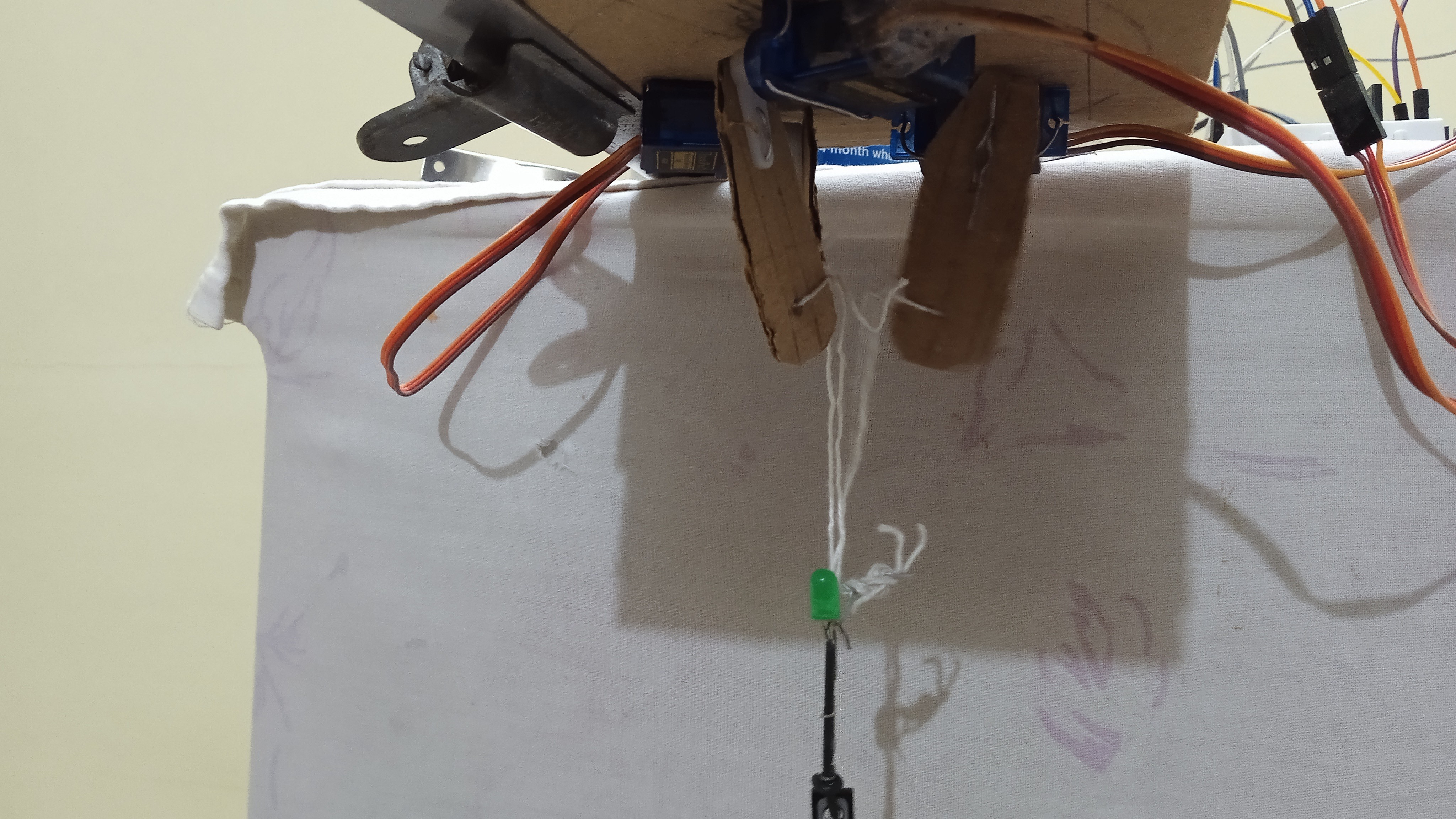
 Using three servo motors arranged at 120°, solid links, and cables connected to the end effector, this robot can reach multiple points inside its workspace.
Using three servo motors arranged at 120°, solid links, and cables connected to the end effector, this robot can reach multiple points inside its workspace.
Computer Aided Design (CAD)
_JilSWSZjqk.png?auto=compress%2Cformat&w=740&h=555&fit=max)
I first designed the robot in CAD, then built the real-world setup following the design. The robot is controlled using an Arduino Uno, and the motion is determined through inverse kinematics calculations.
Circuit Schematic
 This is the circuit schematic, here we have three servo motors. These motors are connected to the Arduino Uno prototyping board.
This is the circuit schematic, here we have three servo motors. These motors are connected to the Arduino Uno prototyping board.
Workspace Of The Robot
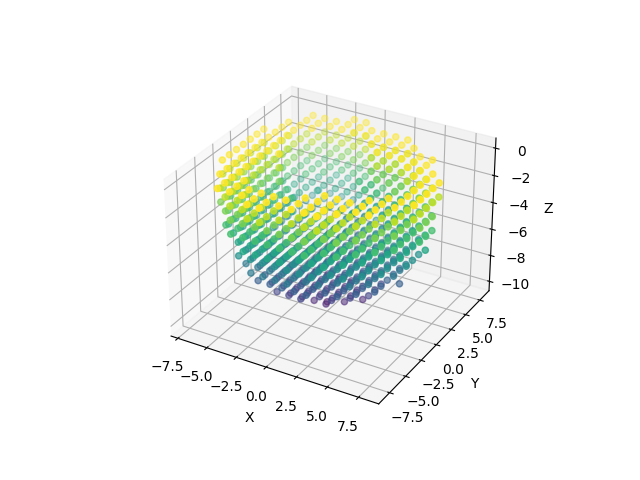
To better understand its behavior, I also created a Python-based simulation to calculate and visualize the workspace of the robot. The simulation predicted a bowl-shaped workspace due to servo limitations, and when tested in the real world, the robot successfully reached those same positions.
2D Hybrid Delta Robot
Earlier had made a hybrid delta robot, but it had two motors with solid links and cable, so its end-effector could only move in two dimensional vertical plane. This robot could draw objects, We used OpenCV and python based object tracking to track the end-effector and its joints. We also controlled this robot via internet using a webpage in browser. We also controlled the motors of this robot directly from Arduino IoT.
Click here for more details on 2D Delta Robot
2D Delta Robot
Earlier had made also made a pure delta robot, but it had two motors with solid links, so its end-effector could only move in two dimensional horizontal plane.
However, this robot is called a Hybrid Delta Robot because one of its links is replaced by cables instead of rigid parallel links. This introduces an interesting limitation: the system relies on gravity to keep the cables under tension. Because of this, the robot would not function properly in zero-gravity environments, such as on the International Space Station. In space, the cables would go slack, and the robot would lose precise control of its end effector.
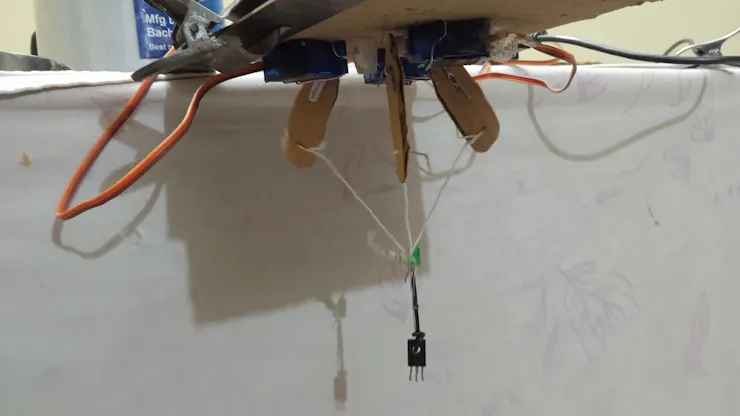
I also tested the extreme points of the robot’s workspace, validate the simulation results.
In future we can make improvements such as stronger and precise servo motors, better cable for proper tension, improved inverse kinematics algorithms, and additional degrees of freedom.
This project demonstrates how robotics concepts like delta mechanisms, cable-driven systems, workspace analysis, and simulation can be combined to create a unique robotic design.
Robotics EveryDay!

 robotmaker team
robotmaker team
 Ted Huntington
Ted Huntington
