 Myu
Myu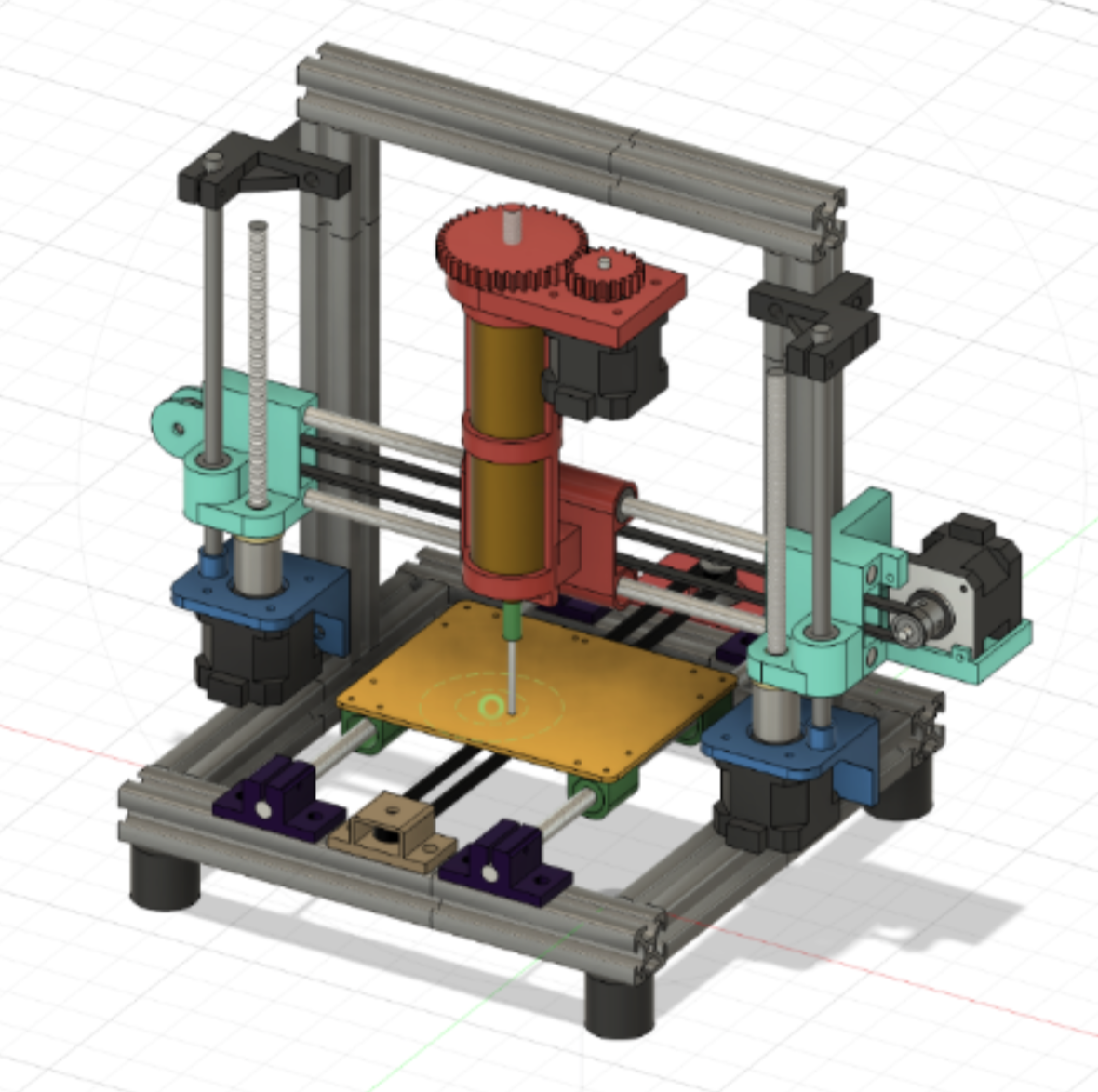
This is my initial CAD model.
I later added limit switches for homing but didn’t have enough time to fully incorporate them. Instead, I used sensorless homing built into the software. The limit switches actually ended up interfering with the sensorless homing.
There were originally two stepper motors for the Z-axis, but they caused uneven, rough movement, so I removed one from the lighter end. This helped prevent the X-axis from tilting. The printer has two plates because I initially made the extruder too high relative to the bed, so I added a second plate with leveling to compensate. I used a BIGTREETECH Octopus V1.1 control board and tweaked the settings to fit my printer. I also got a lot of help from our CS 12 TA with the software side, since I didn’t have any prior experience (thanks, Katie!).
There are still some issues to fix, such as uneven extrusion, unstable linear movement of the syringe, printing more complex shapes, and figuring out how to generate G-code. I plan to continue improving this project if I have time in the future.