 Silícios Lab
Silícios LabNever forget to feed your fish again and with the right amount, at the right time.
Regular feeding is one of the most important factors for the health and growth of fish, whether in home aquariums or larger breeding systems. However, maintaining this consistency manually is not always practical, especially in busy routines or during periods of absence.
With this in mind, this project presents an automatic feeder developed with 3D printing, designed to be simple, efficient, and accessible. Using a mechanism based on a conveyor screw (Archimedes screw) driven by a servomotor, the system allows precise control of the amount of feed dispensed.
In addition to solving a common problem, the project also opens up possibilities for more advanced applications, being able to be integrated with different forms of control from simple drives to automations with microcontrollers and connected systems.
Throughout this article, you will understand how the device works, how it was structured in the 3D modeling, and what control possibilities exist to adapt the system to your needs.
System Operation
The feeder's operation is based on a simple and highly efficient mechanical principle: the transport of material by means of an Archimedes screw. This mechanism is widely used in industry to move grains, powders, and small solids—and here it has been adapted to dose feed in a controlled manner.
Inside the device, the feed is stored in a reservoir positioned at the top. This reservoir has an opening that allows the feed to fall into a pipe where the conveyor screw is housed.
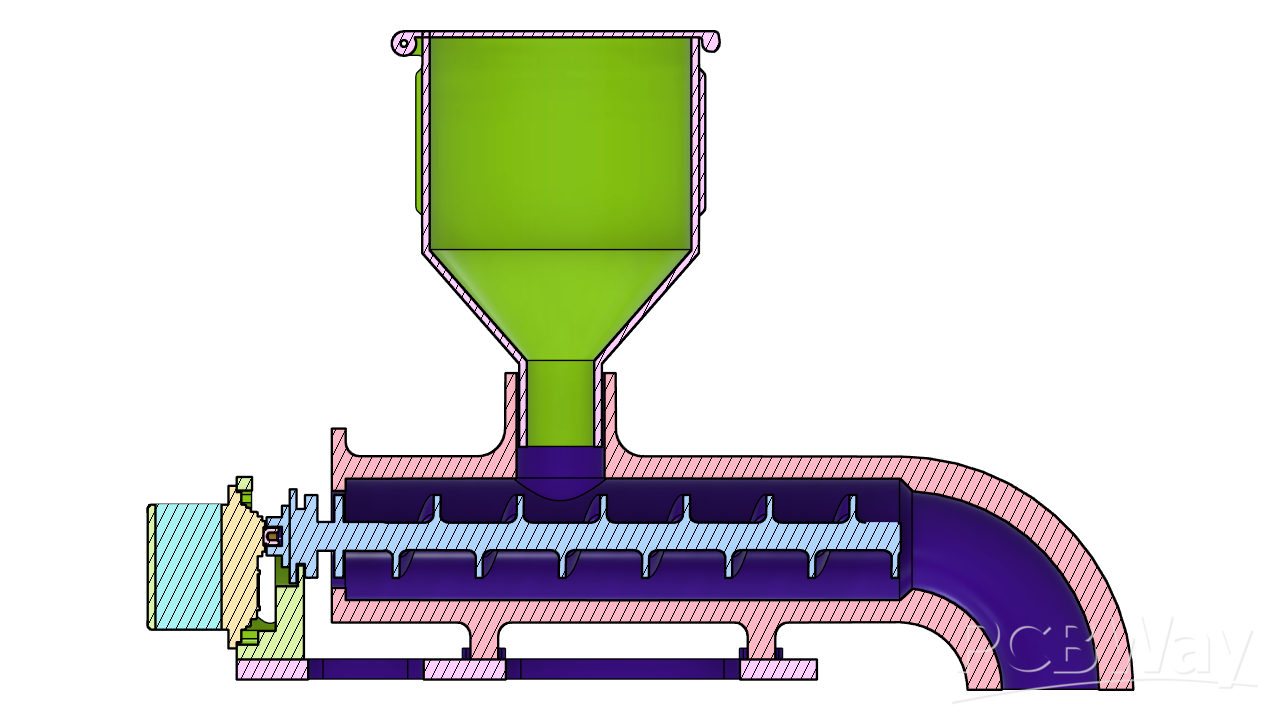 When the servomotor MG995 is activated, it transmits rotation to the screw. As the screw rotates, it pushes the feed along the piping to the system outlet. This movement occurs continuously and in a controlled manner, ensuring that the feed is released gradually, and not all at once.
When the servomotor MG995 is activated, it transmits rotation to the screw. As the screw rotates, it pushes the feed along the piping to the system outlet. This movement occurs continuously and in a controlled manner, ensuring that the feed is released gradually, and not all at once.
The great advantage of this type of mechanism lies in its predictability: the amount of feed released is directly related to the time (or angle) of rotation of the screw. In other words, the longer the motor remains rotating, the greater the amount of feed dispensed.
The system is controlled by a PWM (pulse width modulation) signal, which defines the position of the servomotor. Depending on how this control is implemented, it is possible to rotate the screw for a specific time or position it at specific angles, directly influencing the dosage.
In practice, the operating cycle works as follows:
- The feed remains stored in the reservoir.
- When the system is activated, the servomotor rotates.
- The screw transports the feed through the piping.
- The feed is released at the outlet, ready for consumption by the fish.
This model ensures more uniform feeding, reduces waste, and allows for fine adjustments according to the type and size of feed used.
3D Structure and Modeling
The project was developed focusing on simplicity, efficiency, and ease of manufacturing through 3D printing. The entire structure was designed to be modular, allowing for intuitive assembly, simple maintenance, and possible adaptations as needed by the user.
The feeder's architecture is composed of several main elements: the feed reservoir, the transport tubing, the Archimedes screw, the structural base, and the servomotor support. Each of these parts has a specific role in the system's operation and was modeled considering the limitations and best practices of 3D printing.
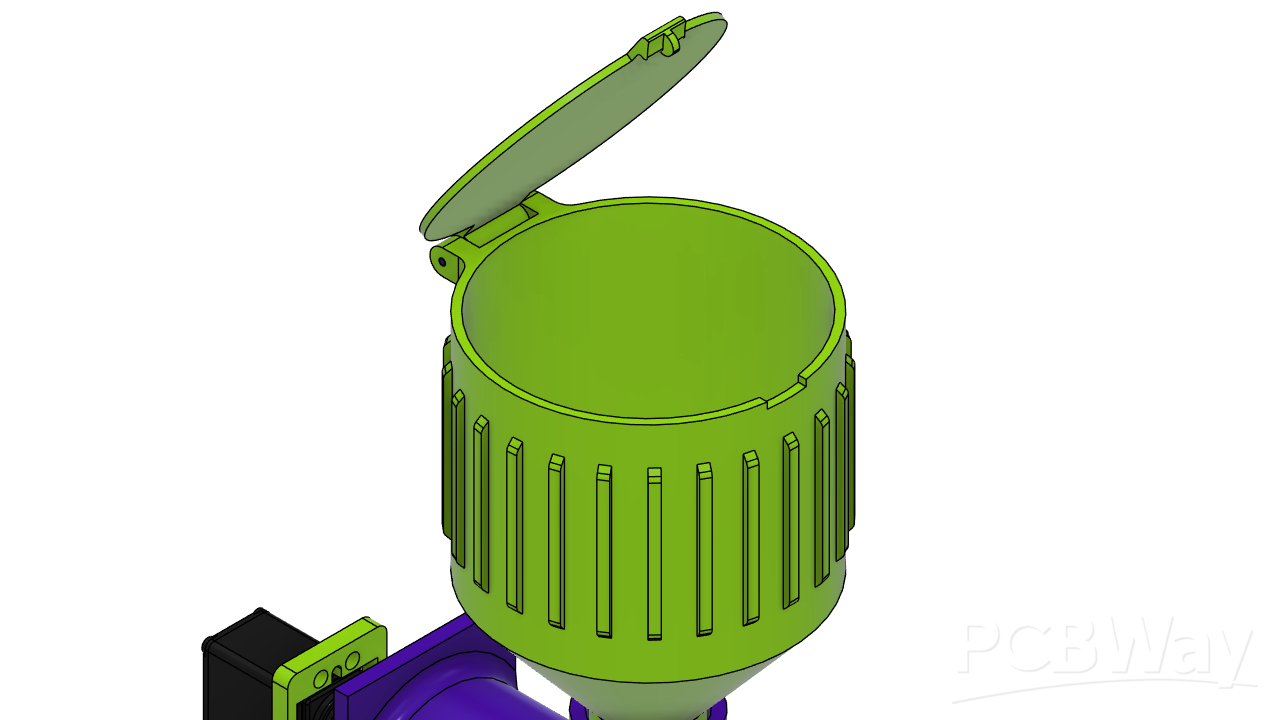
The reservoir was designed to store the feed and consistently direct it to the system's inlet. The internal geometry prevents accumulation and facilitates the flow of material by gravity, reducing the risk of feeding failures. The reservoir lid was integrated into the body by means of a hinge, allowing for practical opening and closing. To form the axis of this hinge and ensure rotation, it is necessary to insert a piece of filament approximately 30 mm long, which acts as an articulation pin.
The piping is the channel through which the feed is transported. Its internal diameter was designed to allow the feed to pass through without blockages, maintaining adequate clearance between the screw and the inner wall.
The screw conveyor is the central component of the system. Its geometry—especially the pitch (distance between the blades) and diameterwas defined to ensure a continuous and controlled flow of feed. A pitch that is too small can compact the material, while a pitch that is too large can reduce transport efficiency.
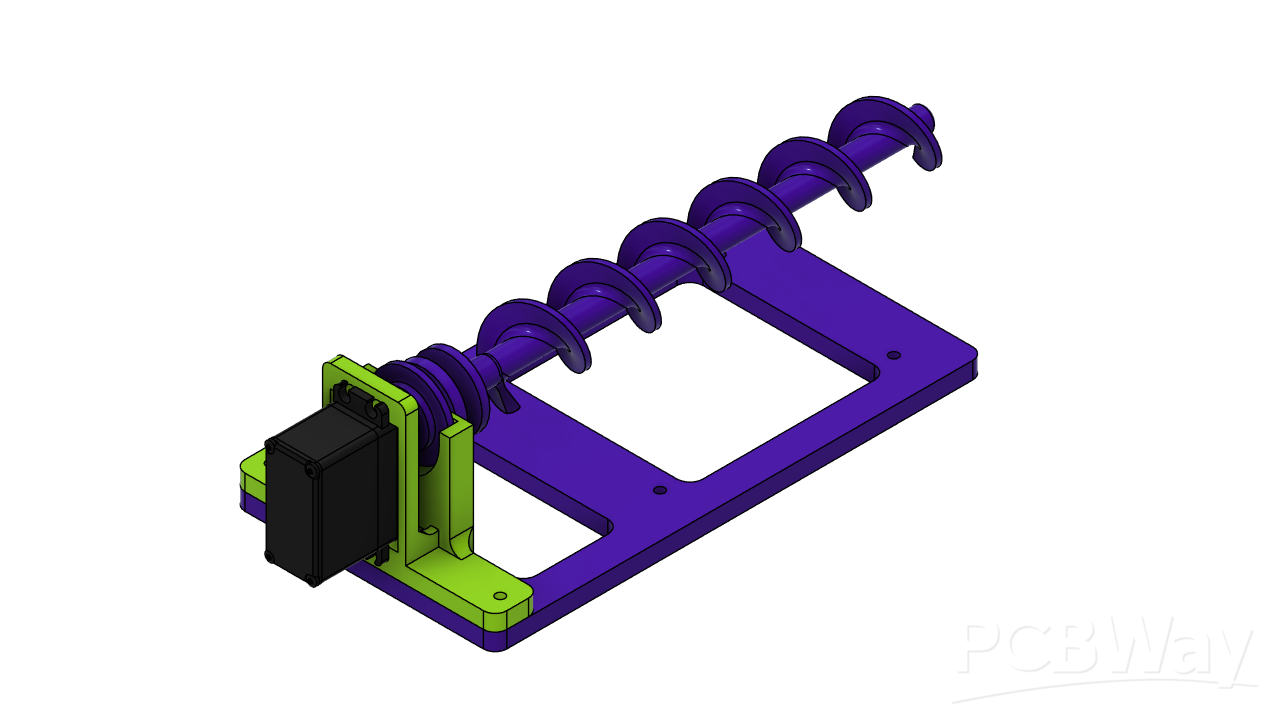
The interface between the servomotor and the screw is also a critical point in the design. A coupling was developed that ensures torque transmission without excessive backlash, preventing loss of movement or misalignment during operation.
The structural base serves as support for the entire assembly, maintaining alignment between components and facilitating the system's fixation in the operating environment.
During modeling, some precautions were essential to ensure proper functioning:
- Adequate clearances: avoiding excessive friction between moving parts
- Printing tolerances: considering typical variations of the 3D printer
- Part orientation: reducing the need for supports and improving finish
- Ease of assembly: simple and intuitive fittings
In addition, the design was conceived to minimize common problems in 3D printing, such as deformations and structural failures, prioritizing geometries that favor mechanical strength and repeatability of the parts.
The result is a functional system that is easy to print and assemble, and can be reproduced even by those without much experience in 3D modeling, while also providing a solid foundation for future improvements and customizations.
Control System
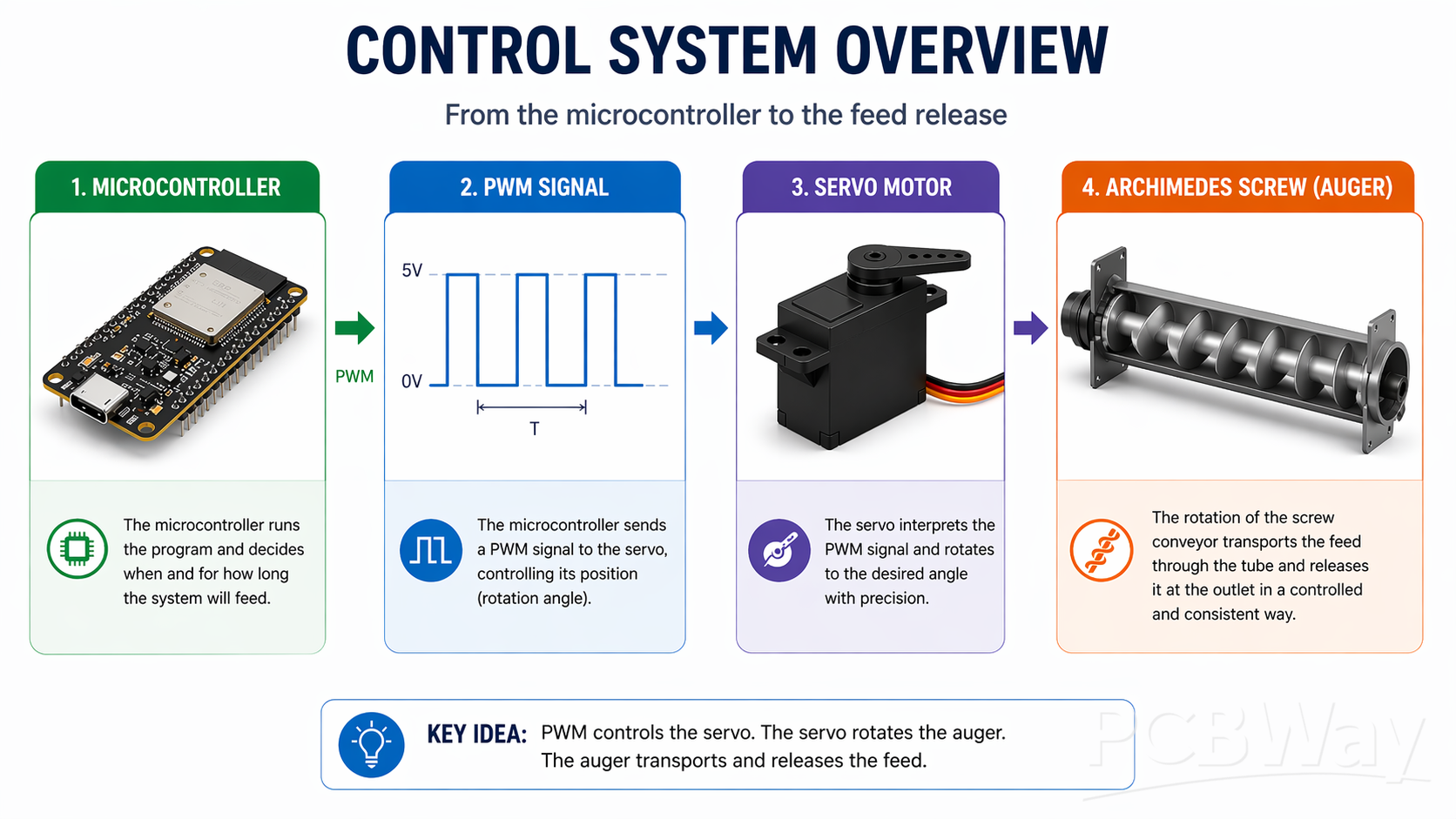
The feeder control system was designed to be simple, precise, and easily adaptable to different levels of complexity. At the heart of this system is the servomotor, responsible for driving the conveyor screw via a PWM (pulse width modulation) signal.
In practical terms, PWM is used to define the angular position of the servo. By varying this signal, it is possible to control how much the motor rotates—and, consequently, how much feed the screw transports. This allows for highly predictable dosing, since the amount released is directly related to the time or angle of activation.
A common approach is to use two reference points:
- An initial position (rest)
- And an activation position (rotation to release feed)
By alternating between these positions, the system performs feeding cycles. The time the servo remains activated or the number of cycles executed defines the portion of feed released.
This control can be implemented in different ways, depending on the desired level of automation:
- Manual control: activation by button, ideal for testing or simple use
- Timed control: use of timers to feed at fixed intervals
- Programmed control: use of microcontrollers such as Arduino or ESP32 to define schedules and routines
- Intelligent control (IoT): integration with Wi-Fi, applications or virtual assistants
In addition, the system allows for fine calibration adjustments. Small variations in activation time or servo angle directly impact the amount of feed released, allowing the operation to be adapted to different types and sizes of feed.
Another important point is ensuring a stable power supply for the servomotor, avoiding variations that could compromise the precision of the movement. In more robust projects, the use of a dedicated power supply for the servo is recommended.
Overall, the control system offers an excellent balance between simplicity and flexibility, allowing for everything from basic applications to more advanced and automated solutions.
Integration and Practical Use
After mechanical assembly and control system configuration, the feeder operates autonomously and predictably, requiring little daily intervention. Its integration into the environment is simple and can be adapted to the type of application, whether in domestic aquariums or larger systems.
In practice, operation occurs in feeding cycles defined by the user. These cycles can be activated manually or programmed, depending on the type of control adopted. With each activation, the servomotor rotates the screw for a specific interval, releasing a controlled amount of feed.
One of the most important points in this stage is dosage calibration. As the amount of feed released depends directly on the time or angle of rotation of the servo, it is necessary to perform initial tests to adjust the system according to:
- Type of feed (granulometry)
- Desired quantity per cycle
- Feeding frequency
This adjustment is simple and, once defined, tends to be quite consistent throughout use.
Another relevant aspect is the physical installation of the feeder. The device should be positioned so that the feed outlet is correctly directed to the area where the fish feed. The base of the design facilitates fixing to flat surfaces, ensuring stability during operation.
To ensure reliable long-term operation, some precautions are recommended:
- Keep the reservoir always full.
- Avoid excessive exposure to moisture.
- Perform periodic cleanings to prevent the accumulation of residue.
- Check the servo's operation and for possible wear.
In addition, the system can be easily integrated with more advanced solutions. For example, using an ESP32, it is possible to control the feeder remotely, program schedules via an app, or even integrate with home automation systems.
In practical use, the feeder stands out for its reliability and ability to maintain a consistent feeding routine, directly contributing to the health of the fish and reducing dependence on manual intervention.
Conclusion and Download
This project demonstrates how it is possible to develop a functional, efficient, and accessible system using 3D printing combined with simple electronic control. The automatic feeder solves a real-world problem, offering more precise dosing, regular feeding, and greater user autonomy.
The combination of the Archimedes screw mechanism and servomotor control allows for predictable and easily adjustable operation, making the system versatile for different types of feed and applications. Furthermore, the modular structure facilitates both assembly and future improvements, whether in the mechanical parts or the control system.
Another strength of the project is its flexibility: it can be used in everything from basic solutions with manual operation to more advanced systems integrated with microcontrollers and connectivity.
If you wish to replicate, study, or evolve this project, all files are available for download:
Feel free to adapt the project to your needs. The idea is that it serves as a basis for new solutions, encouraging the creation, experimentation, and development of increasingly intelligent and automated systems.
To transform this idea into something physical with professional quality, you can count on PCBWay, a company specializing in the manufacture of electronic boards (PCBs) and 3D printing services. With them, it's possible to produce both the electronic and mechanical components of the project with a high level of finish. In addition, the platform frequently offers discount coupons, which can help reduce costs when bringing the project to life.
Feel free to adapt the project to your needs. The idea is that it serves as a basis for new solutions, encouraging the creation, experimentation, and development of increasingly intelligent and automated systems.