0%
0%
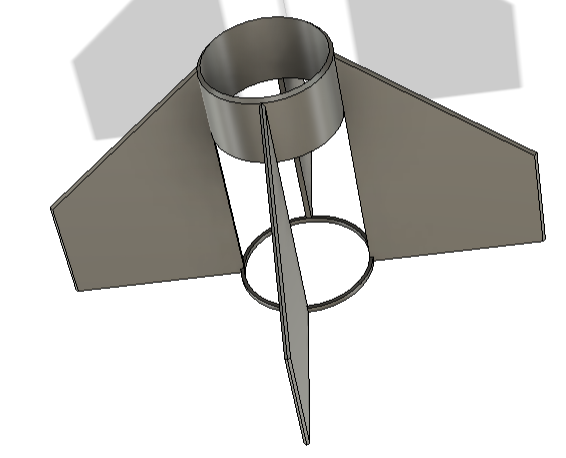
Electron
Electron is a multi-motor solid TVC rocket designed for vertical takeoff, hover, and landing using thrust vectoring.
 kruthick jothimani
kruthick jothimaniBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests











 The next morning, I launched the rocket again. During the flight, the parachute deployed successfully, and the rocket landed in a tree. However, the nose cone broke during deployment.
The next morning, I launched the rocket again. During the flight, the parachute deployed successfully, and the rocket landed in a tree. However, the nose cone broke during deployment.