 Mike Rigsby
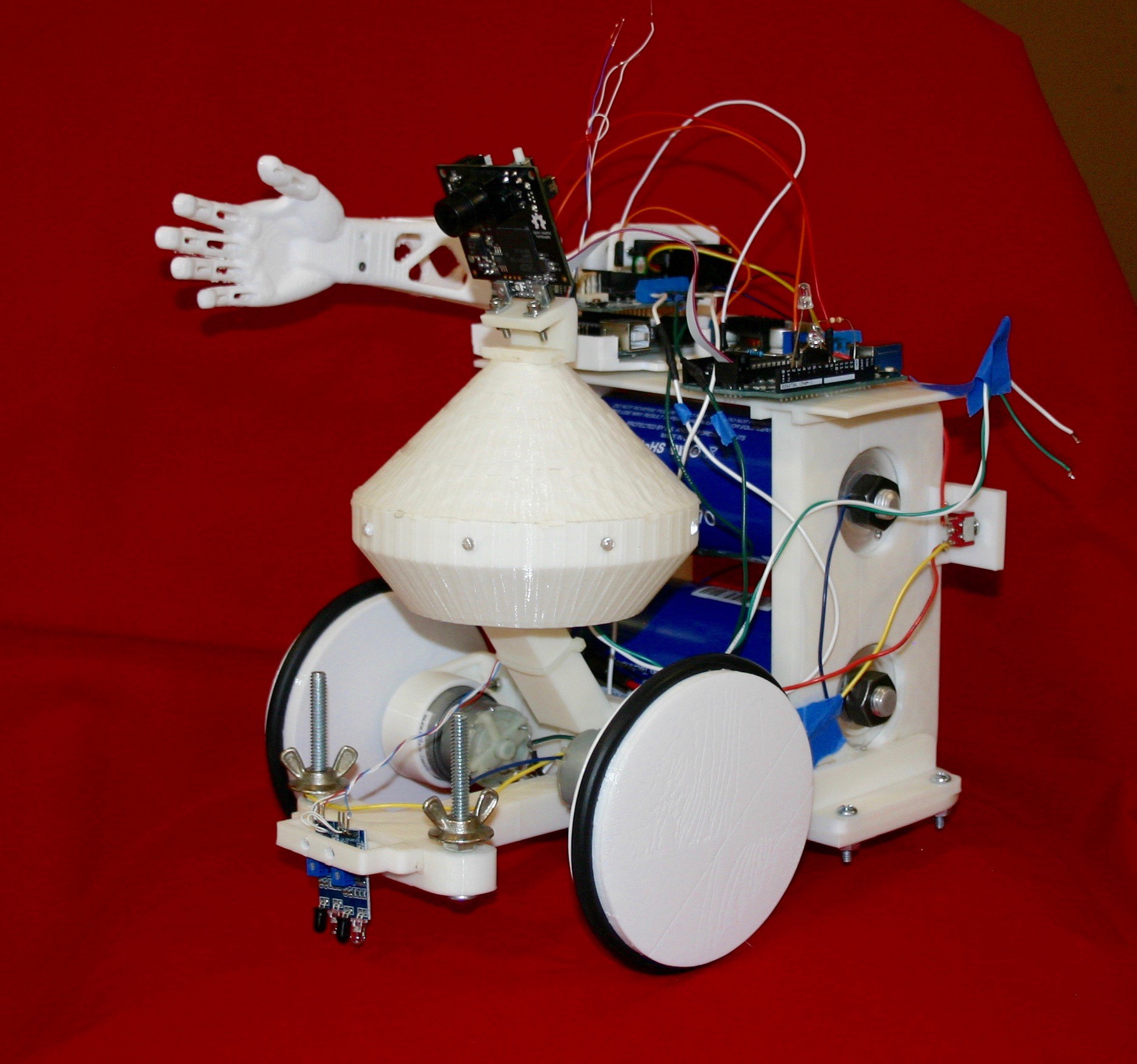
Mike RigsbyI ran across a cool project, "Poppy", an open source bi-ped robot complete with all manner of 3d print files and instructions. I printed one hand and arm--then knew that Blinky needed this to provide a friendly "wave."

I slid the hand into the arm and fastened them together using 2-56 machine screws.

I attached the arm to a servo horn using 2-56 machine screws and nuts.

I printed a bracket to hold the servo motor and attach to the ultracapacitor frame.
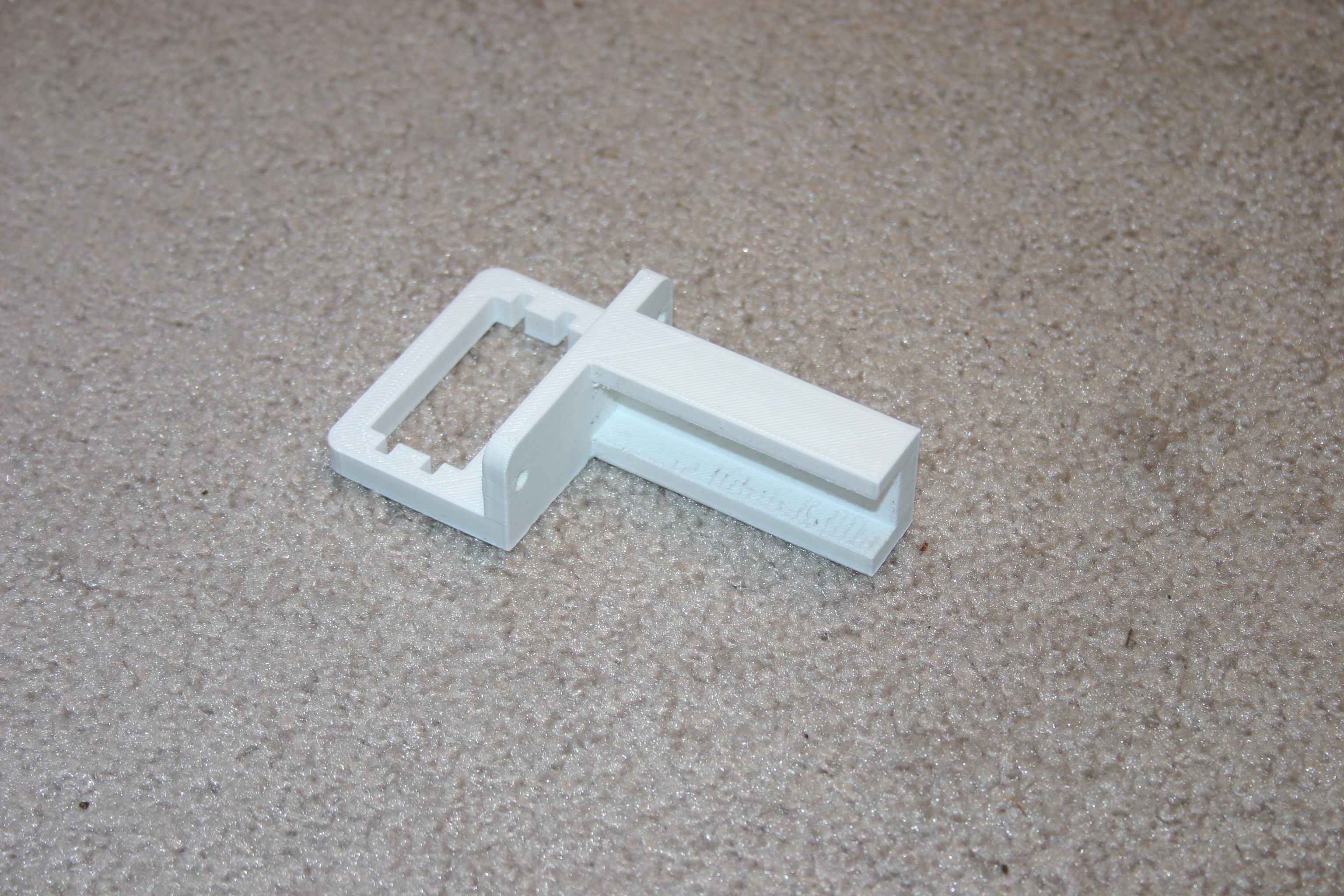
I placed the servo motor in the frame and secured it with 2-56 machine screws and nuts.

I attached the arm to the servo motor using the servo horn screw.

I press fit the bracket onto the back of the ultracapacitor frame. I'll secure it and work out the control electronics and software in a later phase.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.