 Mike Rigsby
Mike RigsbyBlinky now has vision and is able to move toward a "home" target.
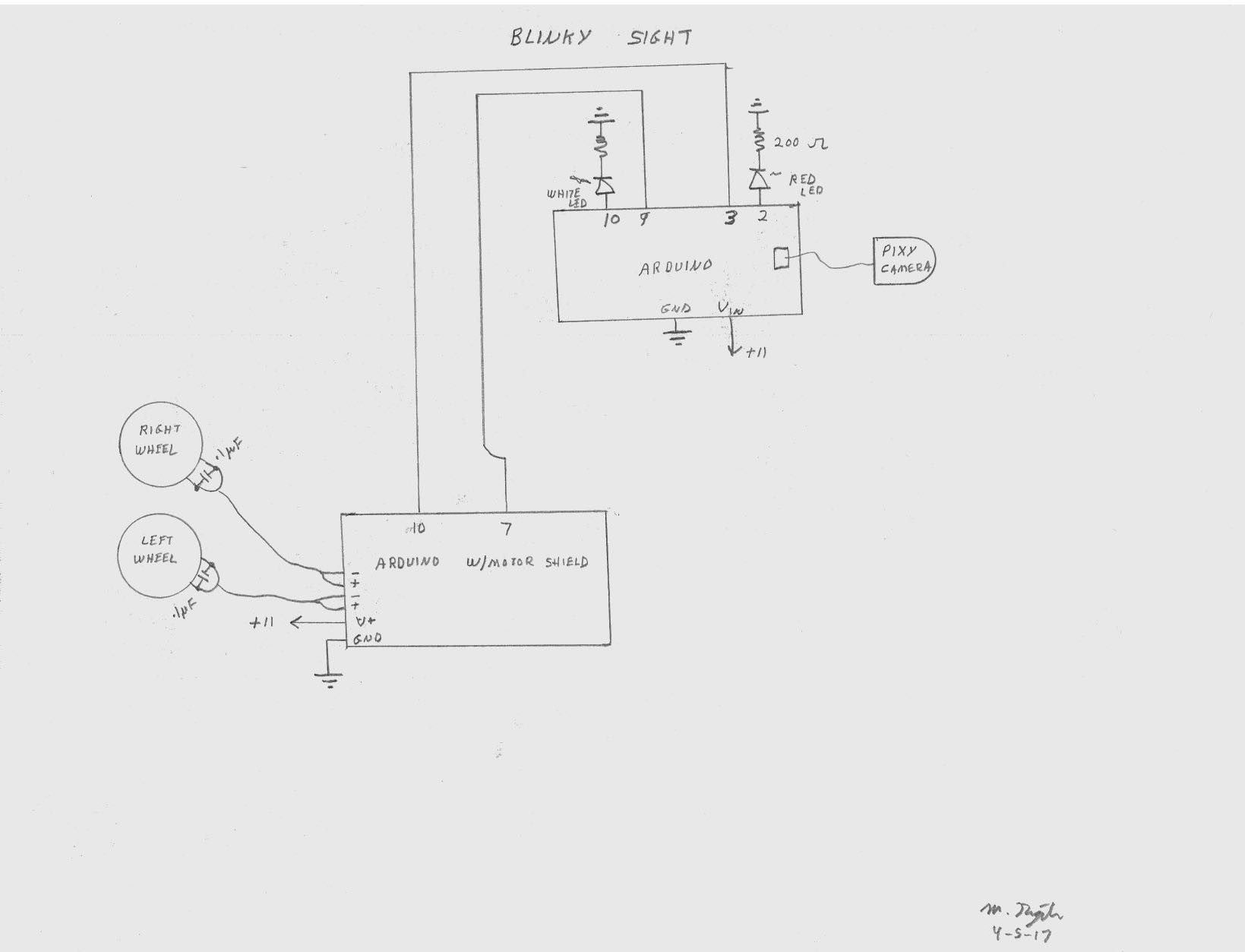
The camera is connected to the motor controller according to the schematic below.
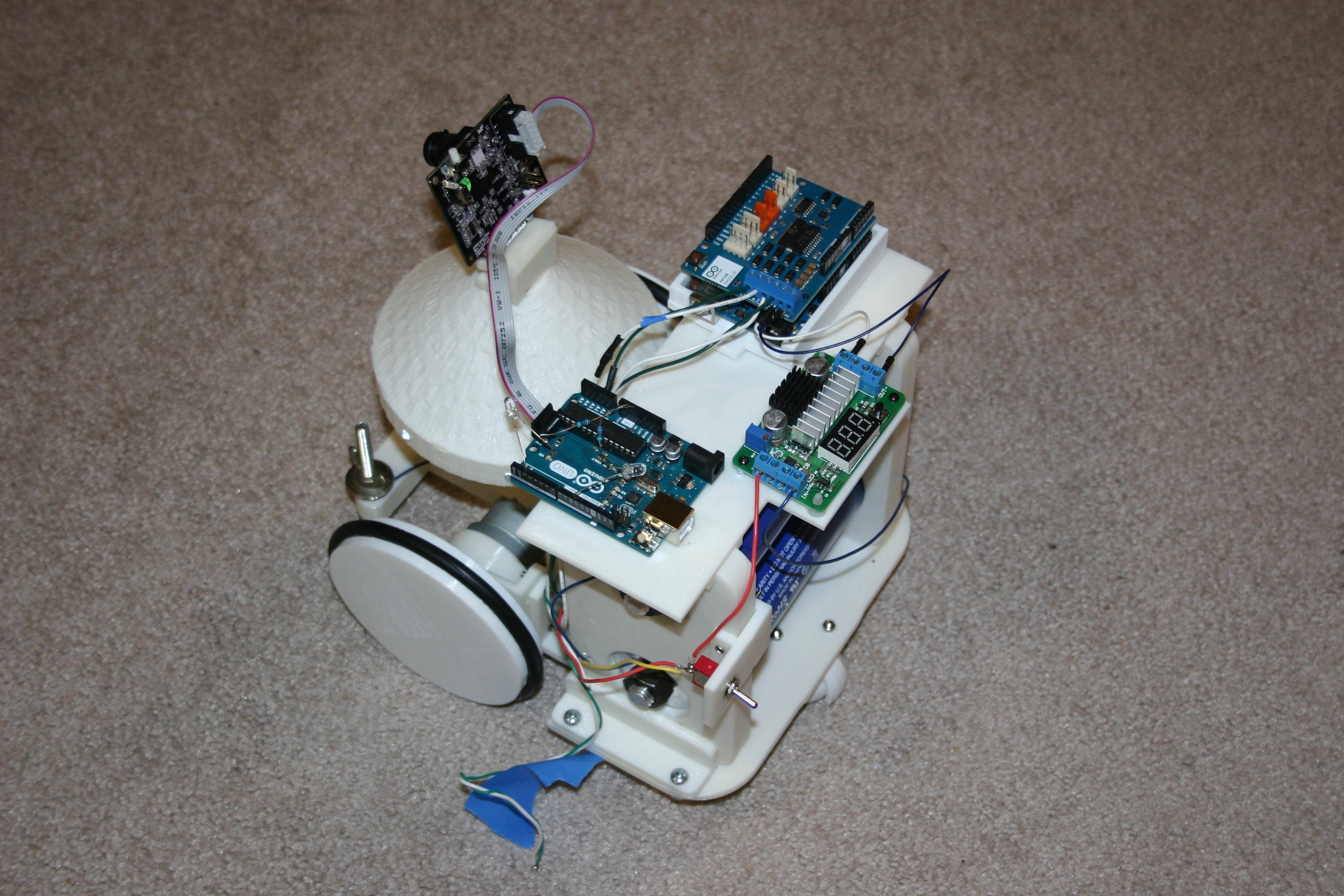
Here's what the top of Blinky looks like with his two Arduino controllers.
We're not approaching the target color in a controlled manner that would allow for docking--but stay tuned. The vision and motor sketches for the Arduinos are posted on this site.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.