 ElectroScope Archive
ElectroScope ArchiveWhy Build a Voice-Controlled Drone?
Traditional drones are controlled using joysticks or mobile applications. While these interfaces are effective, voice control introduces a more natural way to interact with autonomous systems.
The objective of this ESP32 Voice Controlled Drone project is not to replace manual flight controls, but to demonstrate how embedded AI can interpret simple spoken commands such as:
- Take off
- Land
- Move forward
- Move backward
- Turn left
- Turn right
- Hover
- Stop
Each recognized command is converted into flight instructions that are transmitted to the drone's flight controller.

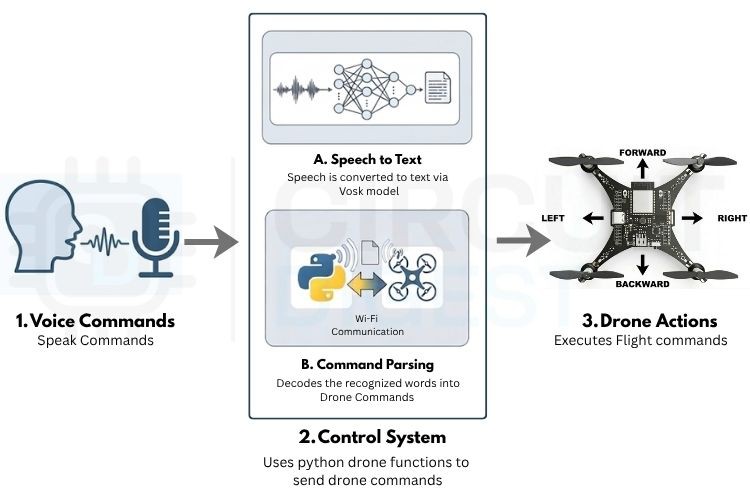
System Architecture
The overall workflow is straightforward:
- A microphone captures the user's speech.
- The ESP32 preprocesses the incoming audio.
- LiteWing performs keyword recognition locally.
- The recognized command is mapped to a flight action.
- The command is transmitted to the flight controller.
- The drone executes the requested maneuver.
Because inference runs entirely on the ESP32, there is no dependency on cloud APIs or external AI services.
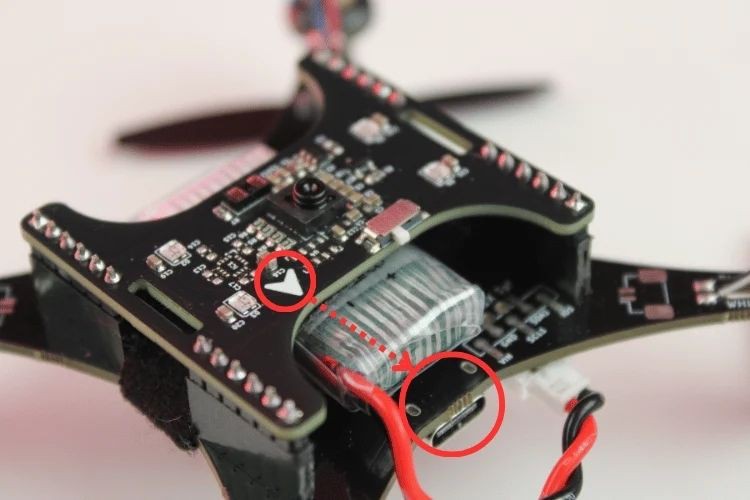
Hardware Used
The exact hardware may vary depending on the drone platform, but a typical setup includes:
- ESP32 development board
- MEMS or I2S microphone
- Flight controller
- Electronic Speed Controllers (ESCs)
- Brushless motors
- LiPo battery
- Drone frame
- Wireless communication interface
- Power regulation circuitry
The modular architecture allows the voice-recognition module to be adapted to different multirotor platforms.
Software Stack
The firmware combines several software components:
- ESP-IDF or Arduino framework
- LiteWing inference engine
- Audio preprocessing routines
- Command interpretation logic
- Flight communication interface
Only a limited vocabulary is used, allowing the recognition model to remain lightweight enough for real-time execution on the ESP32.
Voice Recognition Pipeline
Audio captured by the microphone is processed in several stages before inference.
The incoming signal is sampled, filtered to reduce background noise, and converted into features suitable for machine-learning inference. LiteWing compares these features with its trained keyword model and outputs the most likely command.
Confidence thresholds help reduce false detections caused by ambient noise.
Running the model directly on the ESP32 minimizes latency while preserving user privacy because audio never leaves the device.
Flight Command Mapping
Each recognized keyword corresponds to a predefined flight action.
For example:
- "Take off" initiates the arming and ascent sequence.
- "Land" begins a controlled descent.
- "Forward" commands forward motion.
- "Left" rotates the drone.
- "Hover" maintains the current position, depending on the capabilities of the flight controller.
The mapping layer can easily be expanded with additional commands as more training data becomes available.
Challenges
Building a reliable voice-controlled drone presents several engineering challenges.
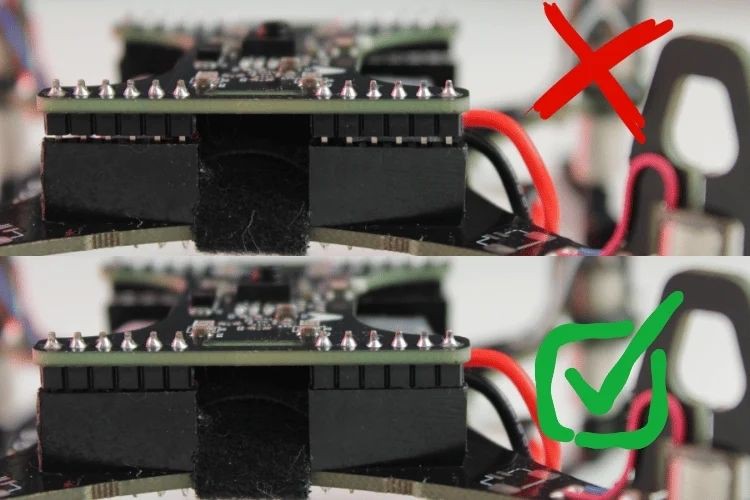
Motor noise can interfere with microphone input, making command recognition more difficult during flight. Careful microphone placement and filtering help improve accuracy.
Latency must also remain low enough that spoken commands feel responsive.
Another important consideration is safety. Voice recognition should complement, rather than replace, conventional flight controls. A manual override and emergency stop mechanism are strongly recommended during testing.
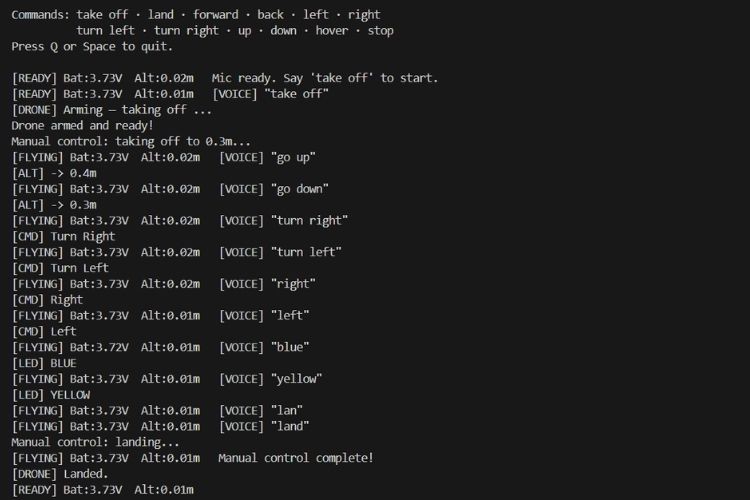
Testing
Testing began on the workbench using serial output to verify that spoken commands were recognized correctly.
After confidence levels were acceptable, command transmission to the flight controller was validated without spinning the motors.
Only after software verification was complete were low-altitude flight tests performed in a controlled environment.
Incremental testing significantly reduced debugging time and improved overall reliability.
Results
The prototype successfully demonstrates that embedded AI can enable intuitive voice interaction with small robotic systems.
The ESP32 provides sufficient processing power for lightweight keyword recognition while maintaining low power consumption, making it a practical platform for edge AI experimentation.
Although voice control is not intended to replace traditional piloting, it offers an engaging way to explore human-machine interaction and embedded intelligence.
Future Improvements
Possible enhancements include:
- Larger voice vocabulary
- Speaker-dependent personalization
- Noise suppression
- Multilingual command support
- Gesture and voice hybrid control
- Autonomous mission execution
- Object detection integration
- OTA firmware updates
Files
- ESP32 firmware
- LiteWing model
- Wiring diagram
- 3D printable mounts
- Flight test videos
Build Status
✅ Voice recognition running on ESP32
✅ Command mapping implemented
✅ Flight communication established
🔄 Ongoing optimization for noisy outdoor environments
Acknowledgements
Their original article provided valuable motivation for exploring embedded AI in drone applications. Interested in building more robotics and embedded AI projects? Explore Drone Projects for DIY drone tutorials and ESP32 Projects for a growing collection of ESP32-based electronics and IoT builds.