 caBattista
caBattistaThe project consists of a zmr250 quad, 5x hc-sr04 sensors a custom build receiver and transmitter.
The quad
It has a custom built receiver made up of an arduino mini, a mpu6050 (gy87) and a nrf24 module. It can receive but also transmit. This will be used to send the data from the mpu6050 and the hc-sr04s back to the transmitter where it will be displayed.
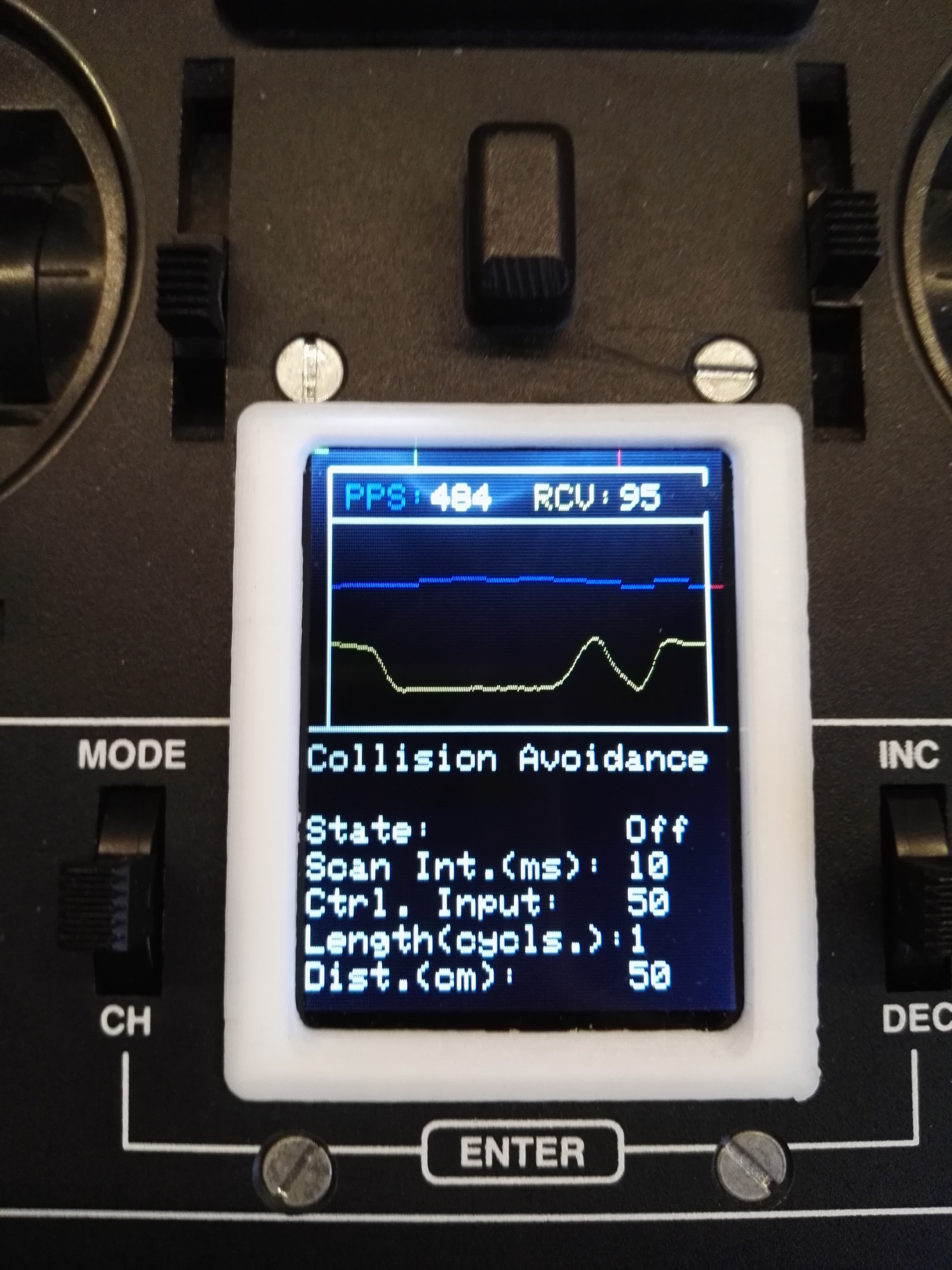
The transmitter
It consists of an stm32f103 board, an nrf24 module and a ili 9341 display.
Here the data will be processed and a image of the surroundings will be drawn. Also the data can be used to control the quad and avoid obstacles. (not sure if it would be better just to do the obstacle avoidance on the receiver arduino...)
transmitter shown here
I've run into quite some trouble reading out the ultrasonic sensors. I suspected the propellers having something to do with it.



 Joe
Joe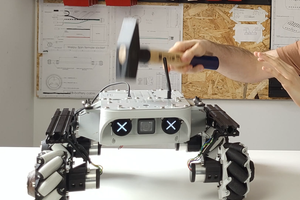
 Kacper
Kacper
 tiefpunkt
tiefpunkt
 staticdet5
staticdet5
Why not use Laser Radar,it can avoid the influences of the noise?