I have had plenty of time to think about my antenna tracker and no time to work on it. This has allowed me to re-invent the smart antenna tracker for the better. I plan to use a brushless design much like the go-pro gimbals used for FPV. I will create a "Parasite" controller board that will attach to a gimbal controller and input corrections for azimuth and elevation. An early design of the mechanical structure can be seen below.
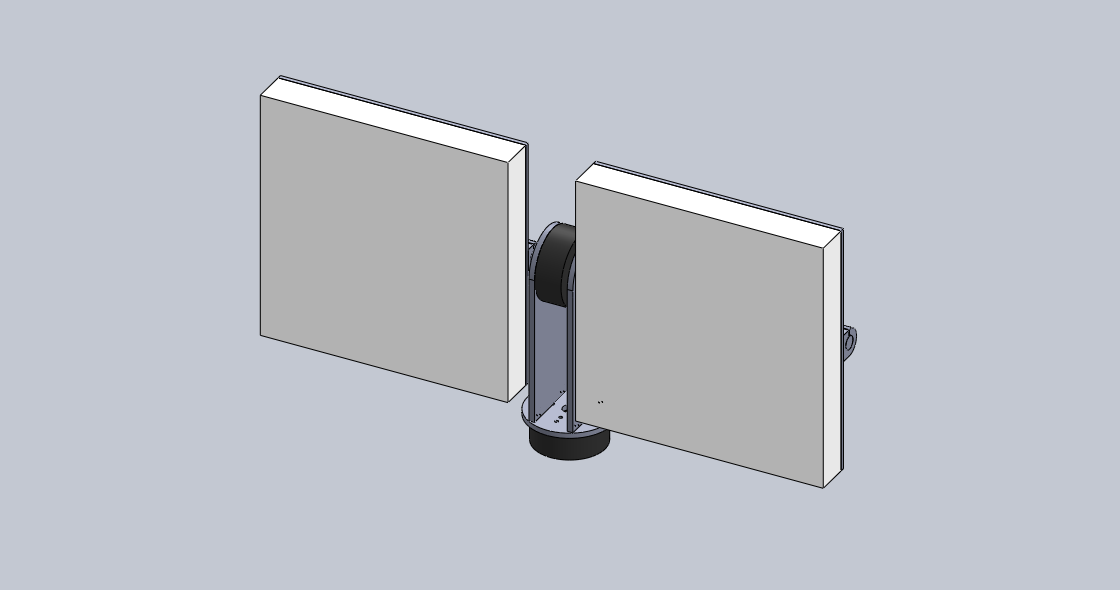
The black cylinders are brushless motors and the white squares are patch antennas. The electronics will be mounted in the gap between the two vertical masts. I'm not sure where the battery will go. That depends on how much power the motors will consume. Hopefully, I can send power through the slip ring and leave the batteries below the azimuth motor.
What isn't shown is a balancing mechanism. Brushless gimbals heavily depend on well balanced systems. So a counter weight is necessary.
Solidworks files are uploaded to github.
Please feel free to critique me on my solidworks abilities. I'm an nx guy so if you have links to solidworks tips, it would be appreciated.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.