 GOAT INDUSTRIES
GOAT INDUSTRIESI managed to hook up a datalogger to the Weedinator control board via I2C and get some idea of the Ublox M8M Satellite positioning performance:
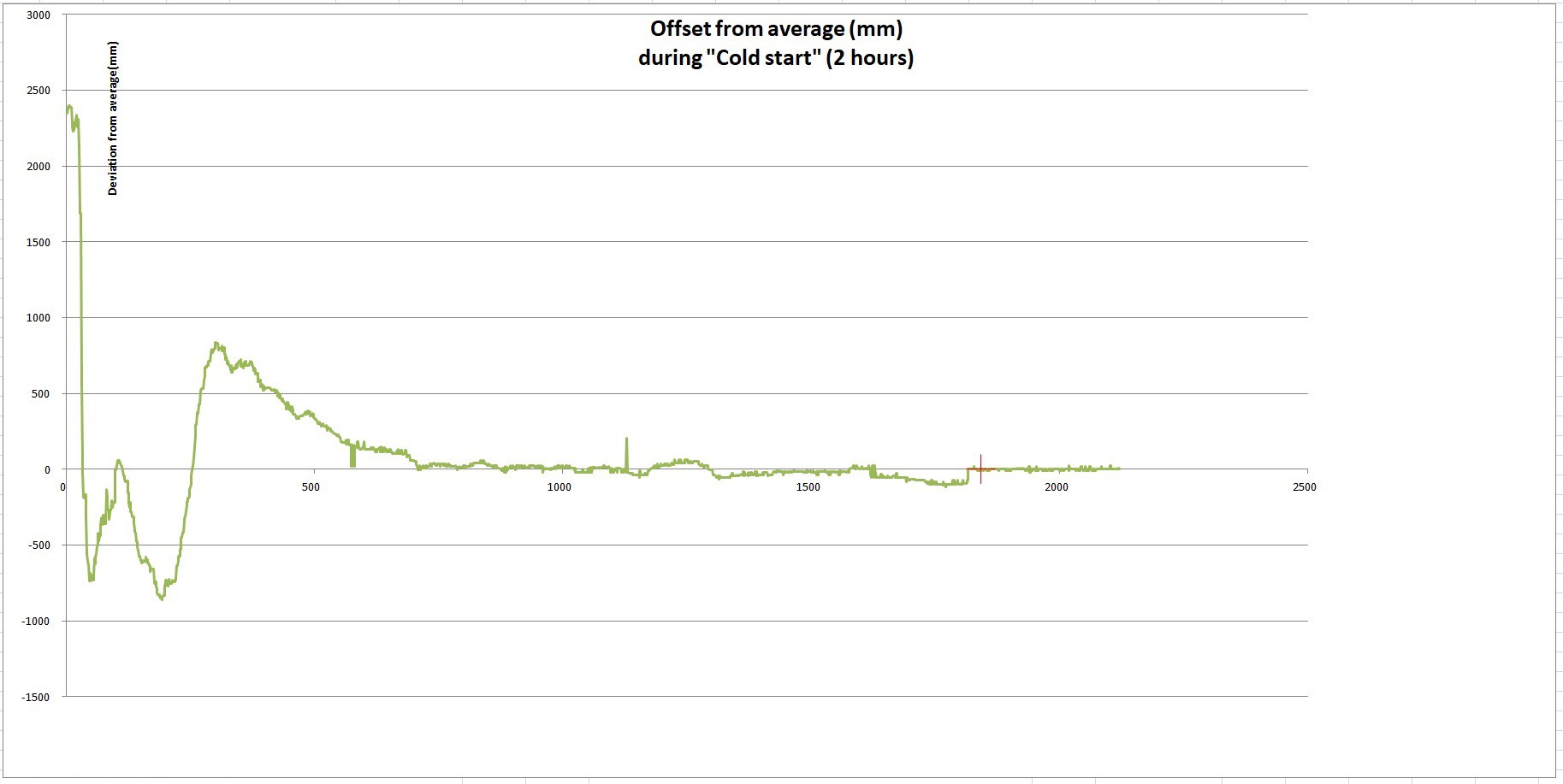 On 'Cold Start', the module started off with lots of error and gradually the error became reduced until, after about 2 hours, it got a RTK fix between rover and base (shown as the red cross). During that 2 hour period, the base module is continually building up and updating an average value for latitude and longitude and after the pre-programmed time interval decides that it has got a good fix.
On 'Cold Start', the module started off with lots of error and gradually the error became reduced until, after about 2 hours, it got a RTK fix between rover and base (shown as the red cross). During that 2 hour period, the base module is continually building up and updating an average value for latitude and longitude and after the pre-programmed time interval decides that it has got a good fix.The next 2 graphs shows behaviour after a 'Hot start' where the base module has already calculated a good average. The top graph is over a 200 minute period and occasionally the fix is lost and the rover sends a NMEA message to the Weedinator that the fix has temporarily become unreliable.
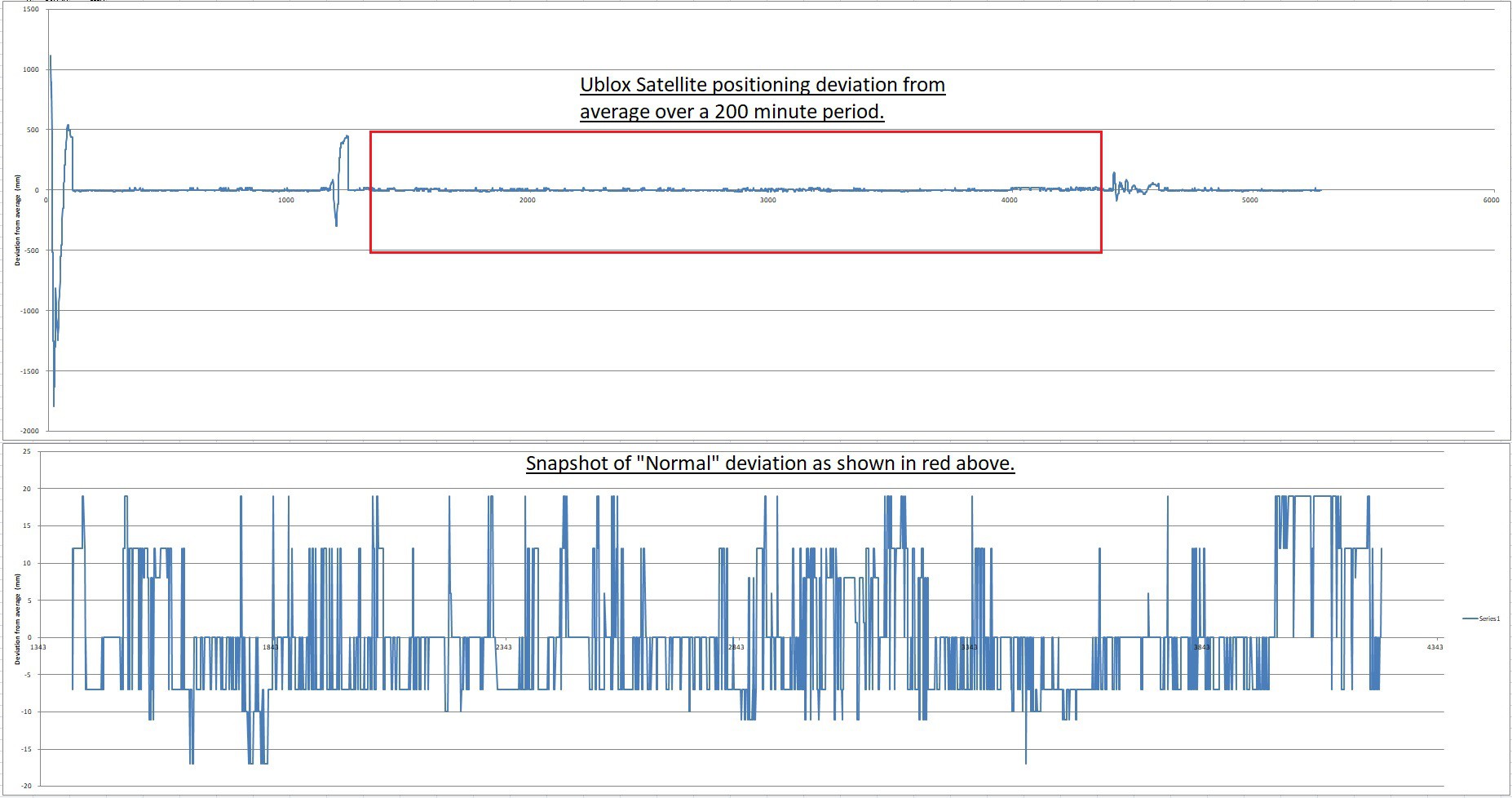 The lower graph is a 'zoom in' on the red box in the top graph and shows a good representative snap shot of the Ublox performance, with total deviation of 40 mm, with is good enough to guide the Weedinator to it's loacation, but possibly not good enough to cultivate the soil around individual plants?
The lower graph is a 'zoom in' on the red box in the top graph and shows a good representative snap shot of the Ublox performance, with total deviation of 40 mm, with is good enough to guide the Weedinator to it's loacation, but possibly not good enough to cultivate the soil around individual plants?
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.