A project log for Object Following Control of a Robotic Camera Arm
Virtual Reality, Kalman Filter, and Inverse Dynamics Control
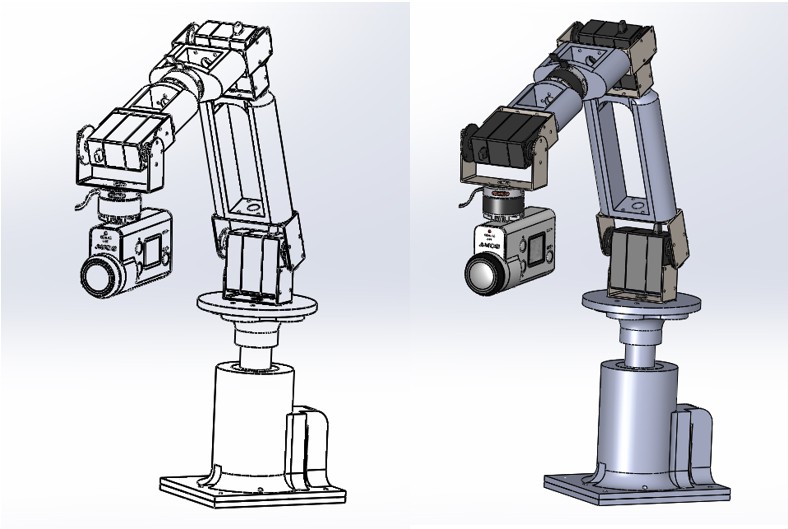
The following visuals belong to the initial design.
Create an account to leave a comment. Already have an account? Log In.
Yes, delete it Cancel
By using our website and services, you expressly agree to the placement of our performance, functionality, and advertising cookies. Learn More

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.