The robot arm assembly is completed and the circuitry is tested.
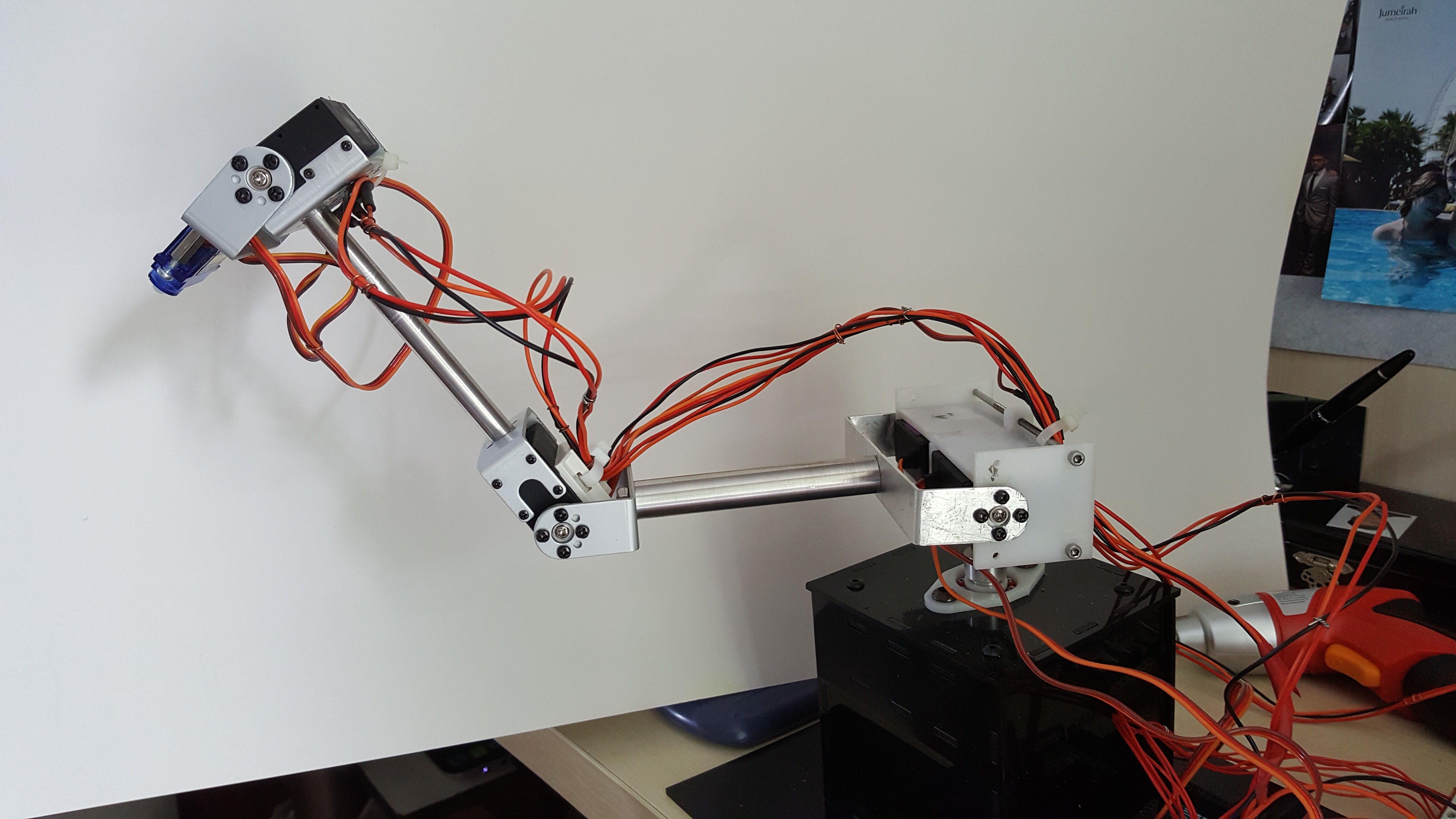
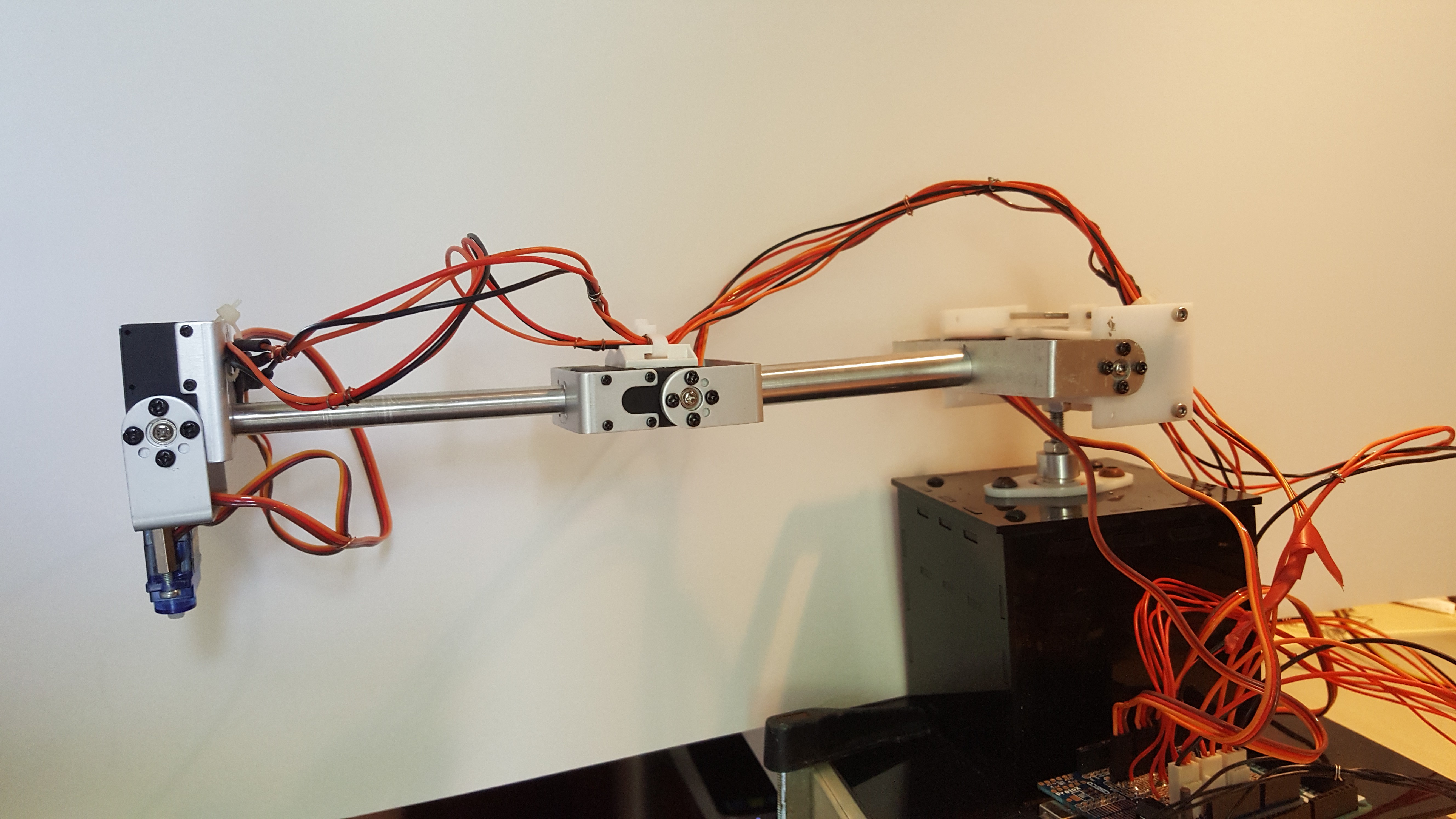
The figure below shows the rest position of the robot arm. It can be seen that the Servo 4 has a slight offset of about 45 degrees. This issue can easily be fixed as shown in the 2nd figure.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.