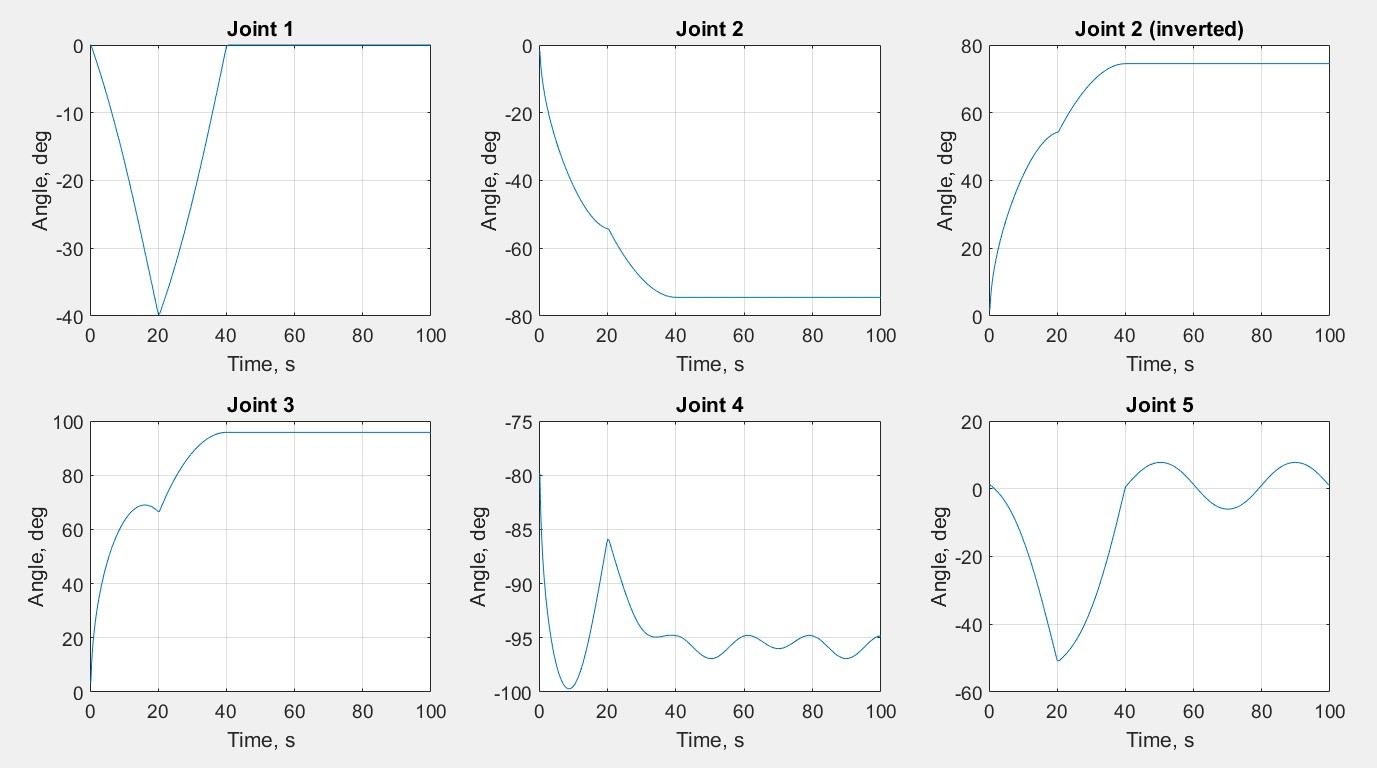
The image below shows the trajectory that is used for testing the trajectory tracing of the robot manipulator. The Cartesian coordinates will be converted into joint rotations using the derived inverse kinematic equations, then these angles (CSV file) will be read using the Processing language.

The individual joint profiles are as follows,
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.